

Unmanned surface vehicle path planning method based on Bi-RRT algorithm guided by improved artificial potential field method
An artificial potential field method and path planning technology, applied in two-dimensional position/channel control, vehicle position/route/height control, instruments, etc., can solve problems such as excessive steering angle, difficult to adapt to sea navigation, and unevenness , to achieve the effect of increasing the corner constraint, reducing the randomness of the algorithm, and ensuring the completeness of the algorithm probability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
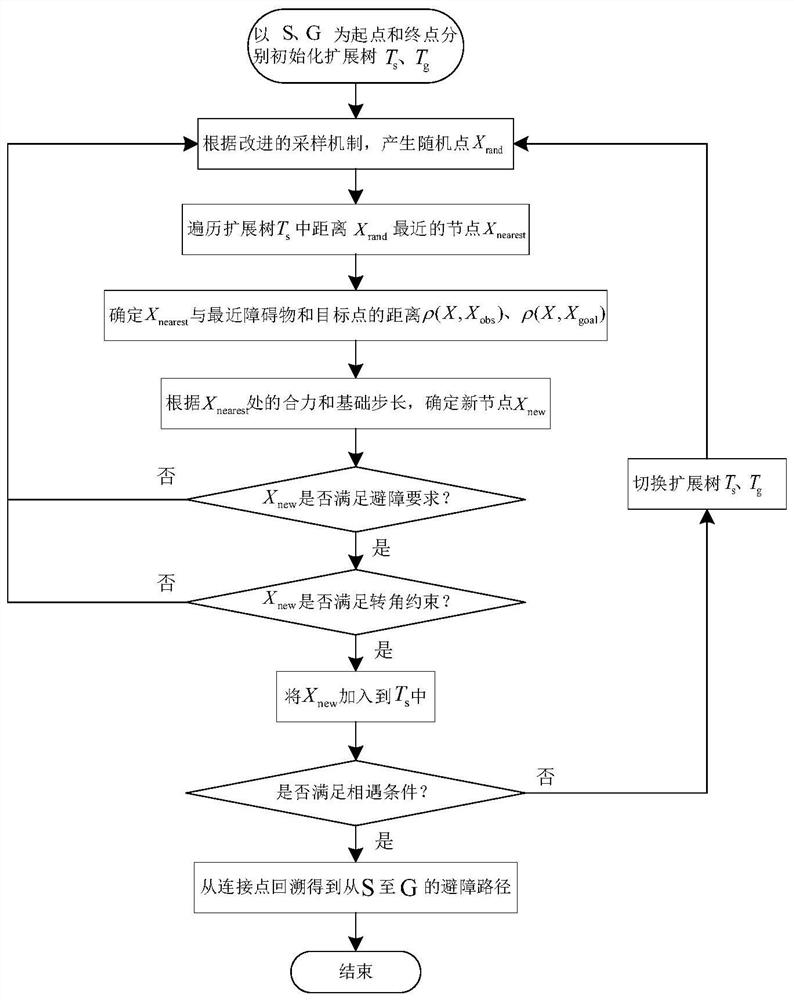
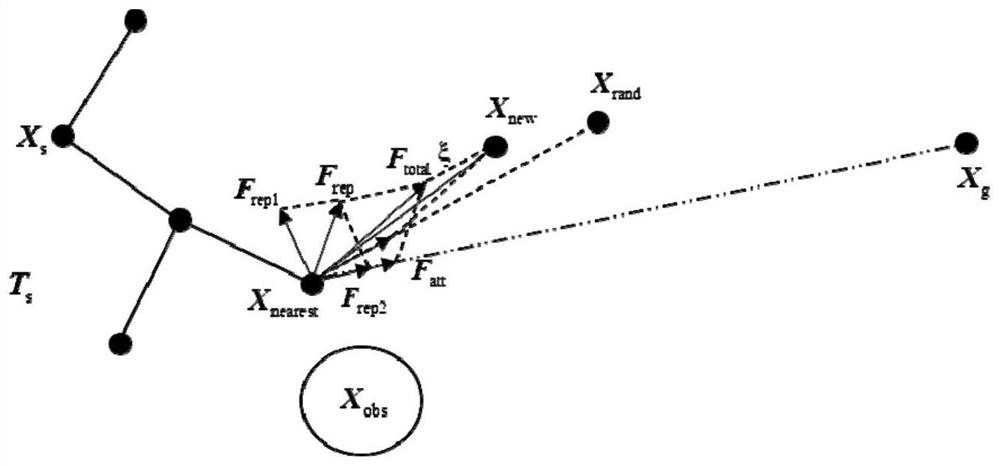
Method used
Image

Examples
Embodiment Construction
[0053] It should be noted that the embodiments of the present invention and the features of the embodiments may be combined with each other without conflict. The present invention will be described in detail below with reference to the accompanying drawings and the embodiments.
[0054] In order to make the purposes, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments It is only a part of the embodiments of the present invention, but not all of the embodiments. The following description of at least one exemplary embodiment is merely illustrative in nature and is in no way intended to limit the invention, its application, or uses. Based on the embodiments of the present invention, all other embodiments obt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More