

AGV course positioning navigation method based on magnetic nail magnetic field intensity correction
A magnetic field strength, positioning and navigation technology, applied in two-dimensional position/course control, vehicle position/route/altitude control, instruments, etc., can solve the problems of positioning error and increase the difficulty of control development, and achieve the correction of accumulated errors and realize Adjustability, efficiency-enhancing effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Example Embodiment
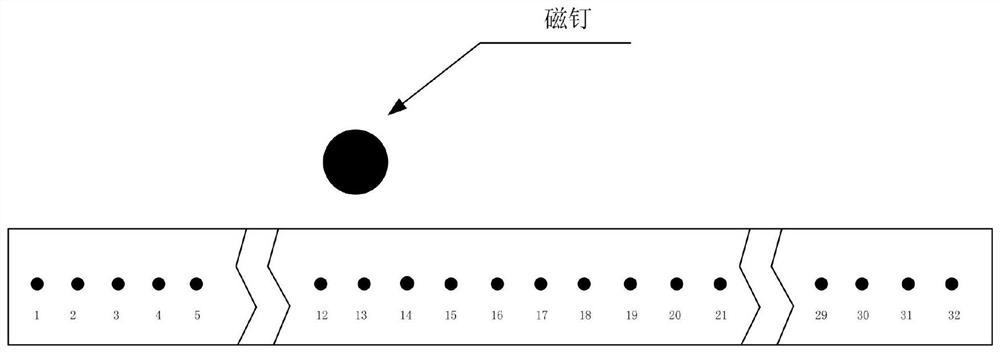
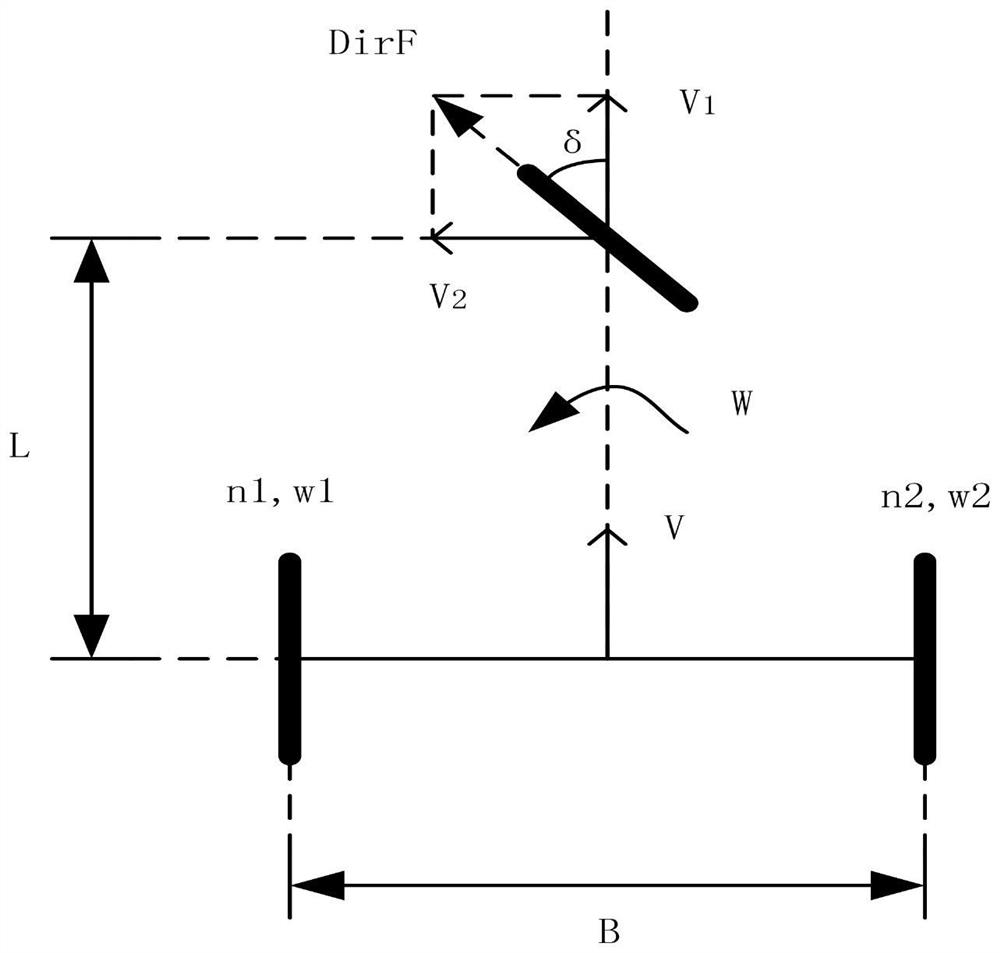
[0031] In the present embodiment: a magnetic nail magnetic field strength correction of AGV heading navigation method, is applied to the AGV in accordance with the planned path navigation of the working scene, in the planning path according to a certain spacing of the magnetic nail arrangement, there must be no other strong magnetic objects around, there must be no obstacles on the moving path; AGV using two-wheel differential drive, assuming that there is a virtual front wheel at the front position of the middle vertical line of the two differential wheels, and the front of the AGV is provided with a magnetic ruler sensor ( Its distance from the ground shall not be higher than 50mm), the mounting plate shall use non-magnetic materials, and the background magnetic field strength shall not be higher than 1 gauss; there is an inertial measurement unit at the internal level of the AGV, and the following points should be noted when installing the inertial sensor:
[0032] First of all...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More