

Teleoperation robot prediction display method based on time delay prediction
A technology of remote operation robot and display method, which is applied in the direction of instruments, simulators, computer control, etc., can solve the problems of reducing operation efficiency and quality, threatening operation safety, and being unable to obtain feedback information from remote operation sites in real time. The effect of non-correspondence between virtual and real signals, improving accuracy, improving transparency and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0039] The present invention will be further described in detail below with reference to the accompanying drawings and embodiments.
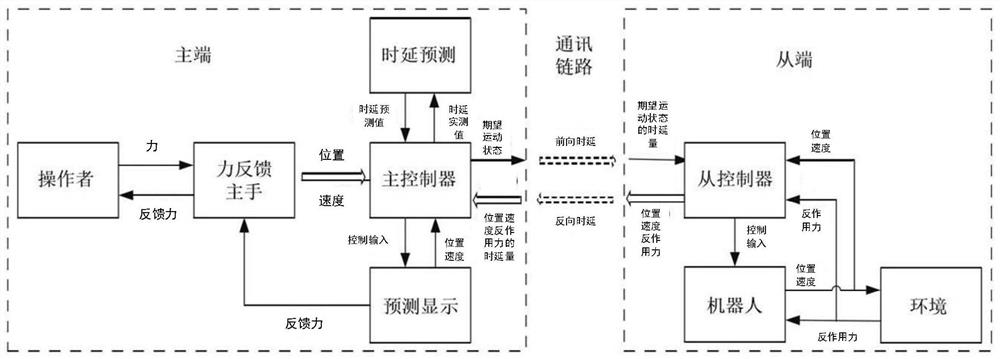
[0040] like figure 1 As shown, in the master-slave teleoperation task, the operator gives the reference position and reference speed of the robot through the force feedback of the master hand, and the master-end controller calculates the position and speed of the slave-end robot in the joint space according to the reference quantity given by the master hand. The desired state is sent to the slave controller. After the slave controller receives the master command, it immediately sends the current state of the robot back to the master. The master controller measures the communication delay according to the time stamp and instruction number on the feedback data packet, and predicts the delay through the delay prediction module. The delay prediction result will be packaged into the next teleoperation instruction. The slave-end controller plans the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More