Point cloud precision determination method, electronic equipment and computer storage medium
A determination method, point cloud technology, applied in computer parts, calculation, electromagnetic wave re-radiation, etc., can solve problems such as difficulty in adapting to large-scale map data production and low efficiency, and achieve the effect of improving determination efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0020] For ease of understanding, before the detailed description of the implementation process of the method of the present application, a usage scenario of the method is exemplarily described, but the method of the present application is not limited to this usage scenario, and can also be applied to other suitable scenarios. in the scene.
[0021] In this usage scenario, it is used to determine the point cloud accuracy of the point cloud collected by the vehicle-mounted mobile measurement system in the same geographic space (the geographic space can be a scanned road or a cell, etc.) in different times. The point cloud accuracy is used to indicate the same The difference value between the point clouds collected in different times in the geographic space or a certain area in the geographic space, and the point cloud that needs to be aligned according to the accuracy of the point cloud, so as to avoid the need for point cloud alignment for a large number of point clouds. The p...
Embodiment 2
[0102] refer to figure 2 , showing a schematic flowchart of the steps of the point cloud processing method according to the second embodiment of the present application.
[0103] The method includes:
[0104] Step S202: Acquire the point cloud accuracy between the first point cloud and the second point cloud.
[0105] The point cloud precision is the point cloud precision obtained by the method in the foregoing embodiment. It should be noted that, if the geographic space corresponding to the first point cloud and the second point cloud is divided into multiple regions, the point cloud accuracy of each region can be obtained respectively. If the geographic space is not divided into multiple regions, the point cloud accuracy of the geographic space can be directly obtained.
[0106] By dividing the geographic space into multiple regions, the number of points involved in subsequent calculations can be reduced, thereby reducing the computational load.
[0107] The following t...
Embodiment 3
[0121] refer to image 3 , showing a structural block diagram of the device for determining the accuracy of a point cloud according to Embodiment 3 of the present application.
[0122] In this embodiment, the device includes:
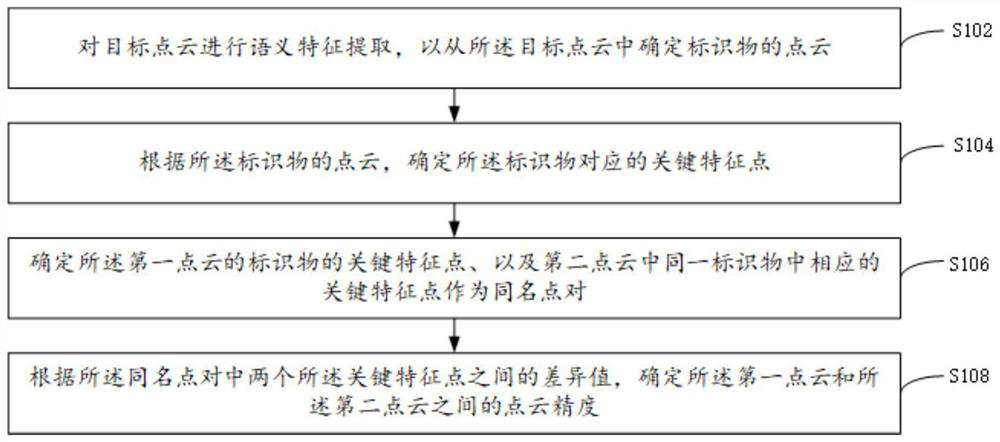
[0123] The first determination module 302 is configured to perform semantic feature extraction on the target point cloud, so as to determine the point cloud of the marker from the target point cloud, and the target point cloud includes a first point cloud and a second point cloud, wherein, The first point cloud and the second point cloud are any two point clouds in the plurality of point clouds;
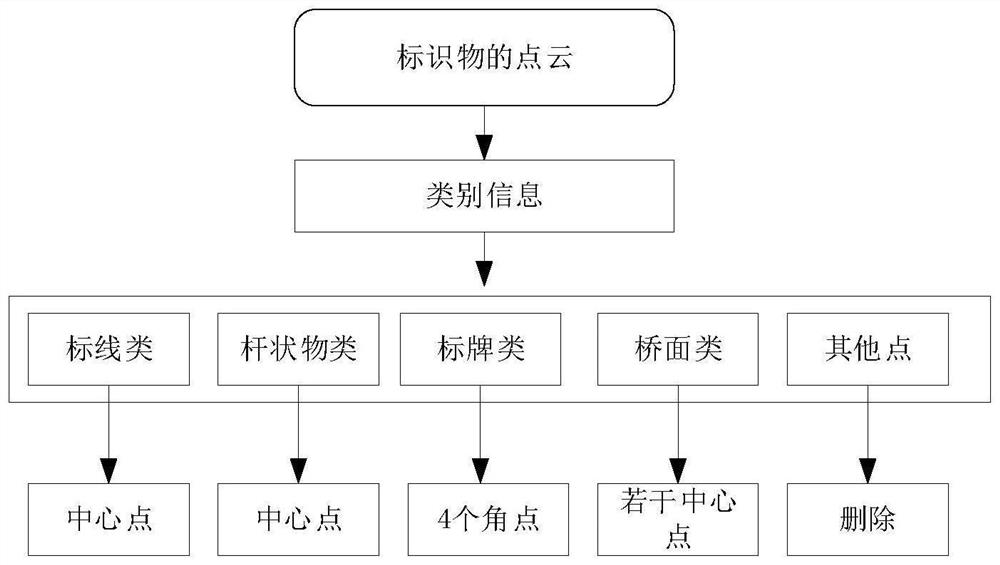
[0124] The second determination module 304 is configured to determine the key feature points corresponding to the marker according to the point cloud of the marker;
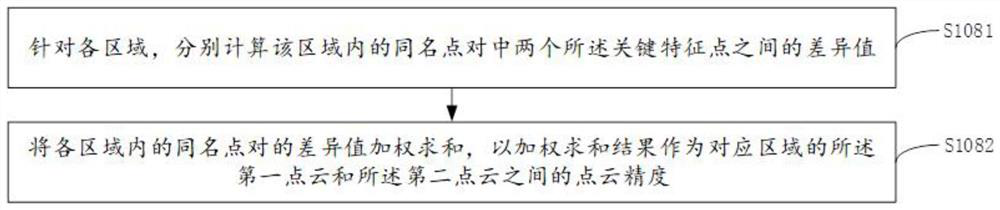
[0125] A third determining module 306, configured to determine the key feature points of the identifier of the first point cloud and the corresponding key feature points in the same marker in t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com