

Hypersphere-based encoder calibration method, device and system
A calibration method and encoder technology, applied in the field of industrial robots, can solve problems such as inaccurate zero position information, and achieve the effect of easy operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the technical solutions of the present invention clearer, the embodiments of the present invention will be described below with reference to the accompanying drawings. It should be understood that the specific descriptions of the embodiments are only used to teach those skilled in the art how to implement the present invention, rather than to exhaust all possible ways of the present invention, nor to limit the specific implementation scope of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
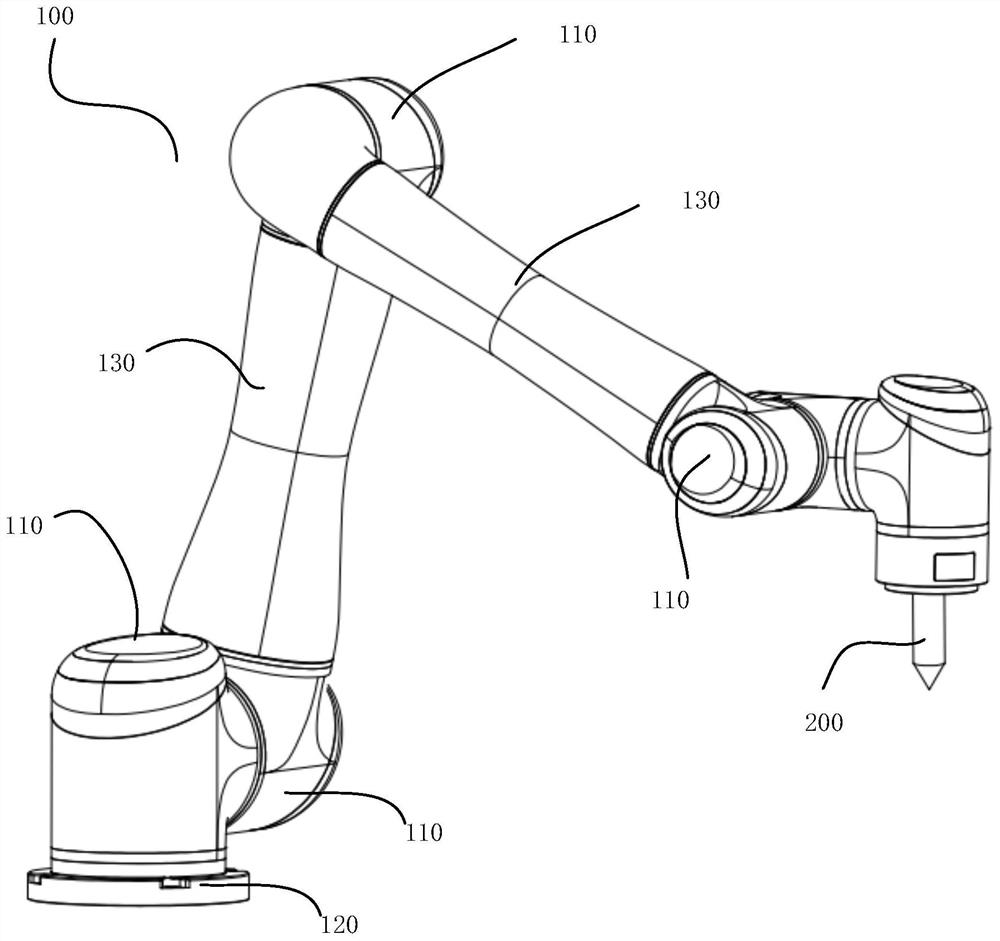
[0021] The present invention protects an encoder calibration method based on a hypersphere, which is applied to a robot. figure 1 , figure 1 A schematic diagram of the structure of a robot 100 according to an embodiment of the present application is shown. The robot 100 includes a base ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More