Wheeled robot motion planning method based on dynamic vector field
A wheeled robot and robot movement technology, applied to combustion engines, internal combustion piston engines, mechanical equipment, etc., can solve problems such as poor robustness and anti-interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] Below in conjunction with the accompanying drawings, the present invention is further described by means of embodiments, but the scope of the present invention is not limited in any way.
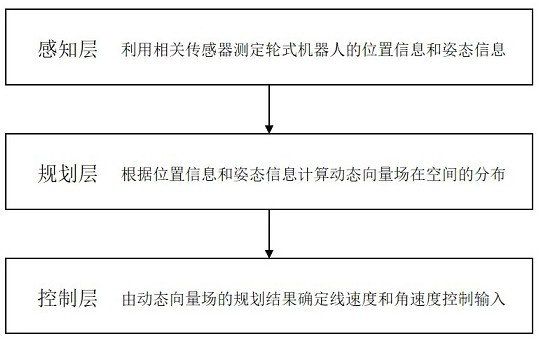
[0019] The present invention provides a method for coordinated motion planning of a wheeled robot based on a dynamic vector field, which can realize the platform module of the motion planning algorithm in the present invention, such as figure 1 shown. The module consists of three parts: perception layer, planning layer, and control layer. Specifically, the perception layer uses sensors to measure the position information and attitude information of the wheeled robot. Next, the planning layer calculates the distribution of the dynamic vector field in space, that is, the planning result, according to the measured information and the planning algorithm. Then, based on the planning result of the dynamic vector field, the control layer determines the linear velocity and angular velocity ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More