

Finite time multi-group cooperative control method of fractional order unmanned system
A time-limited, collaborative control technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as low comparability and inability to complete tasks better
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the accompanying drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0055] The technical scheme that the present invention solves the above-mentioned technical problems is:
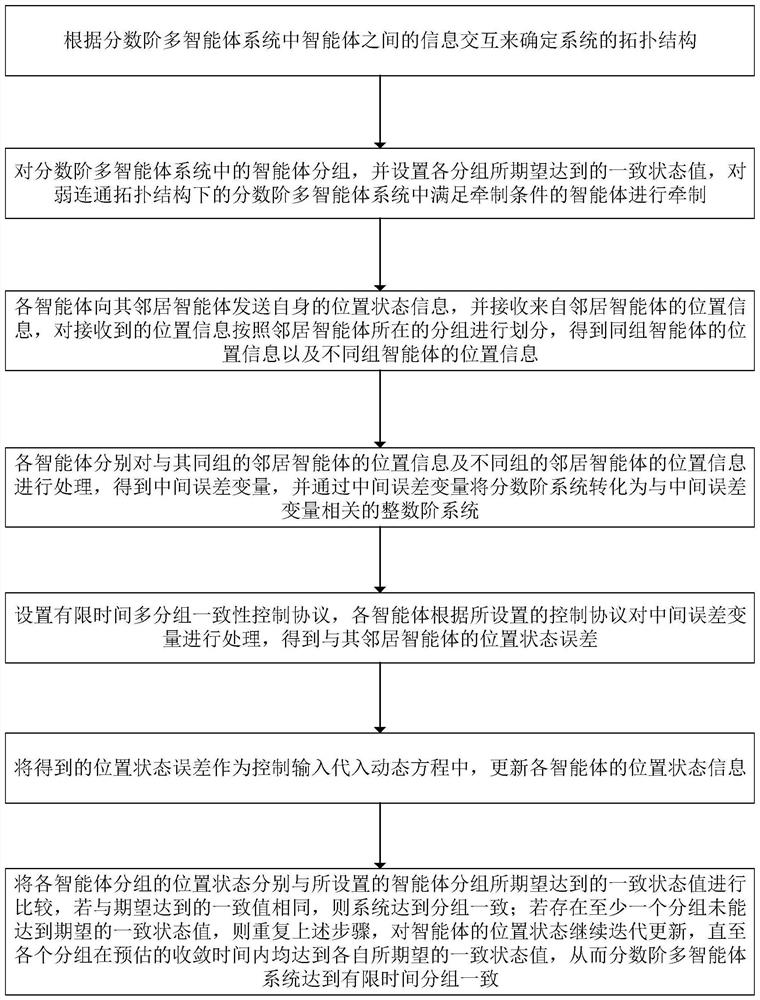
[0056] like figure 1 As shown, a limited-time multi-group cooperative control method for fractional-order unmanned systems includes but is not limited to the following steps:
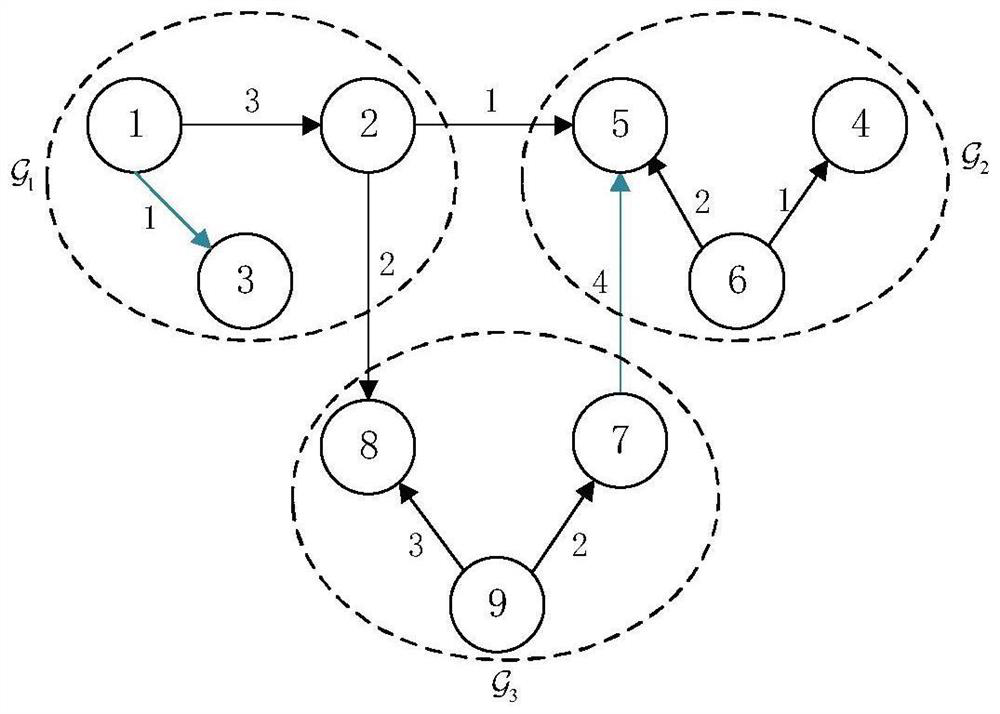
[0057] Step1: Treat the fractional-order unmanned system as a multi-agent system, determine the topology of the system according to the information interaction between the agents in the fractional-order multi-agent system, and use the knowledge of graph theory to analyze the fractional-order multi-agent system topology is described.
[0058] Step2: Group the agents in the system. The agents can be randomly divid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More