

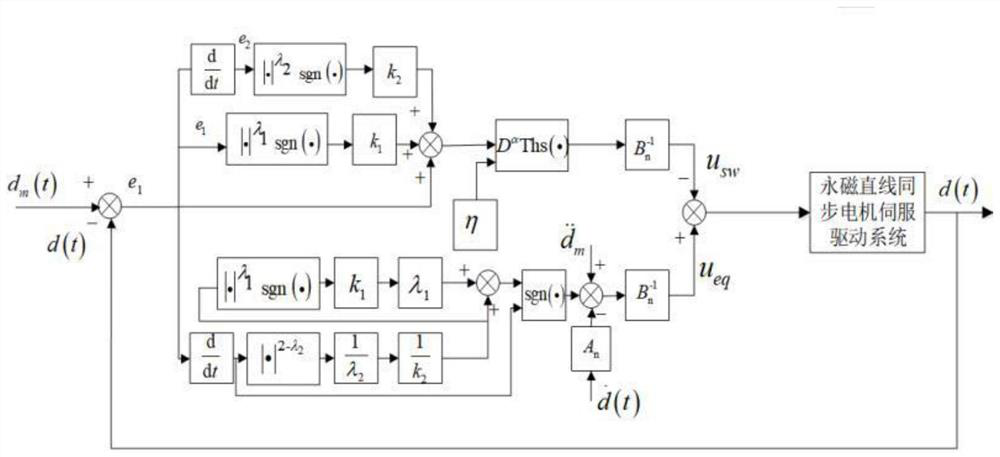
PMLSM servo system control method based on fractional order hyperbolic tangent switching function
A hyperbolic tangent, switching function technology, applied in control systems, control generators, vector control systems, etc., can solve problems such as difficulty in meeting high-precision performance requirements, low tracking accuracy, discontinuity, etc., to speed up the convergence speed and Accuracy, avoiding singularities, improving the effect of response speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
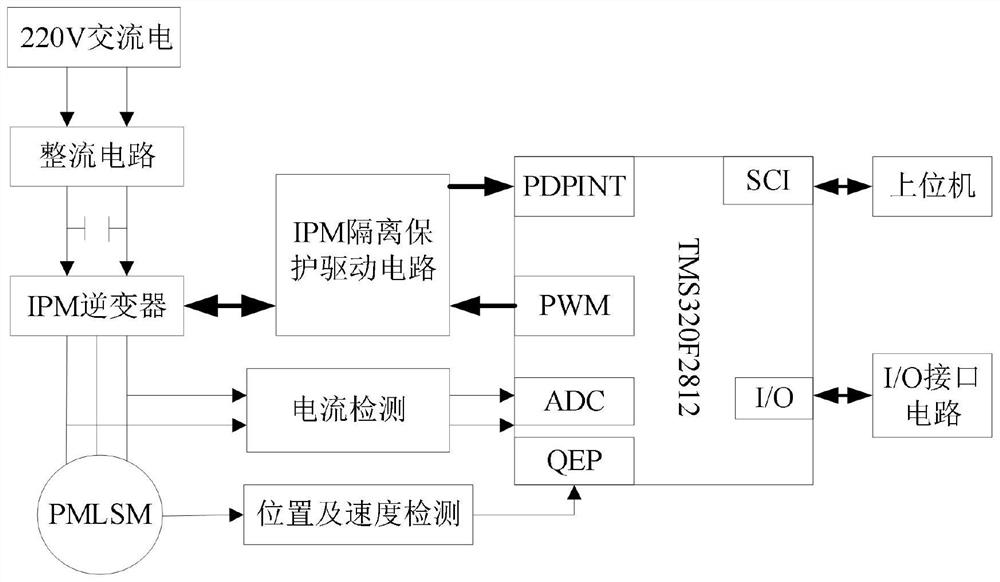
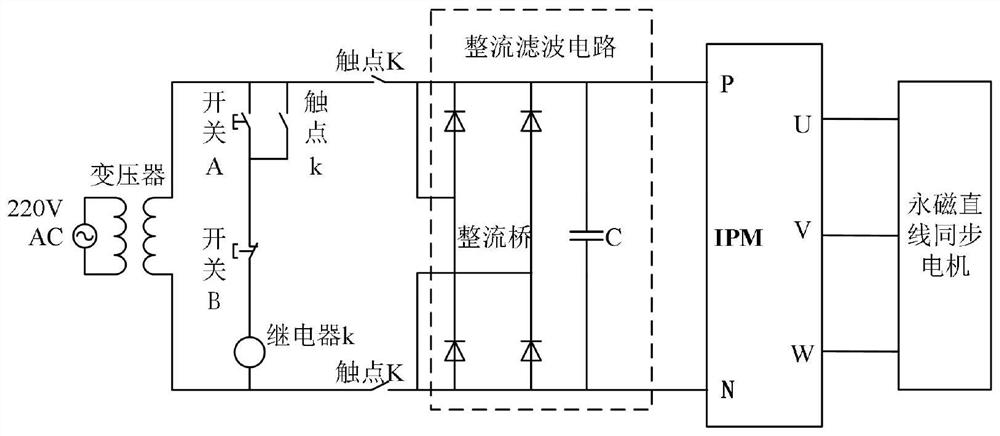
[0026] see Figure 1-10 , the present invention provides a kind of technical scheme: based on the PMLSM servo system control method of fractional order hyperbolic tangent switch function, servo system comprises:
[0027] Main circuit: three-phase AC power supply, rectification filter circuit, IPM inverter circuit;
[0028] Control circuit: DSP processor, position and speed detection circuit, current detection circuit, IPM isolation protection drive circuit, H...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More