Compensation method for grinding and polishing flexible wheel of robot
A compensation method and a flexible wheel technology, applied in the polishing field, can solve the problems of difficult polishing of polishing workpieces, and achieve the effect of convenient use and inconvenient changes in polishing force.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described in detail below with reference to the accompanying drawings.
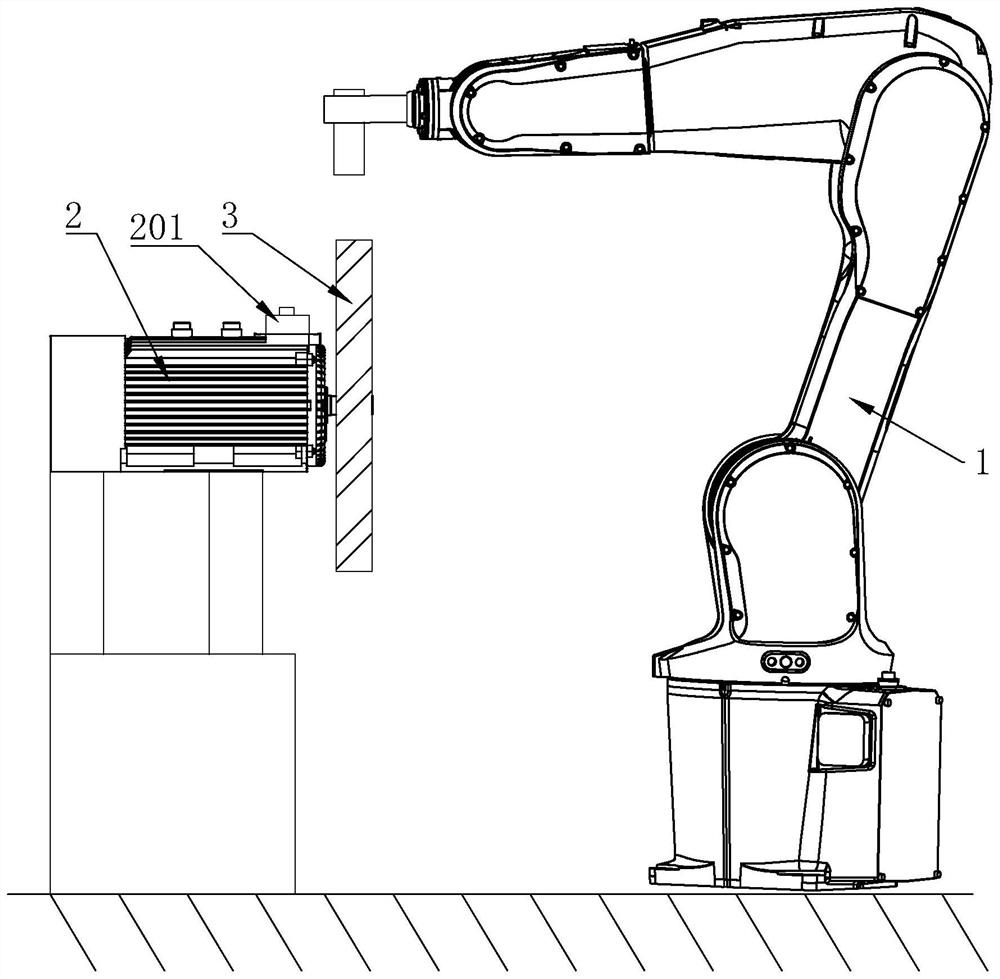
[0034] First of all, the coordinate values in the ideal path program and the actual path program of the robot in this embodiment are set according to the initial coordinate system. The establishment of the initial coordinate system is to control the robot to clamp the workpiece to reach the corresponding flexible wheel through the teach pendant. On the polishing point, and the polishing point is the origin, a space rectangular coordinate system of XYZ three axes is established. This coordinate system is the initial coordinate system. All coordinate values and offsets of coordinate values in the program are obtained according to the initial coordinate system.
[0035] This embodiment discloses a robot flexible wheel grinding and polishing compensation method, which includes the following steps:
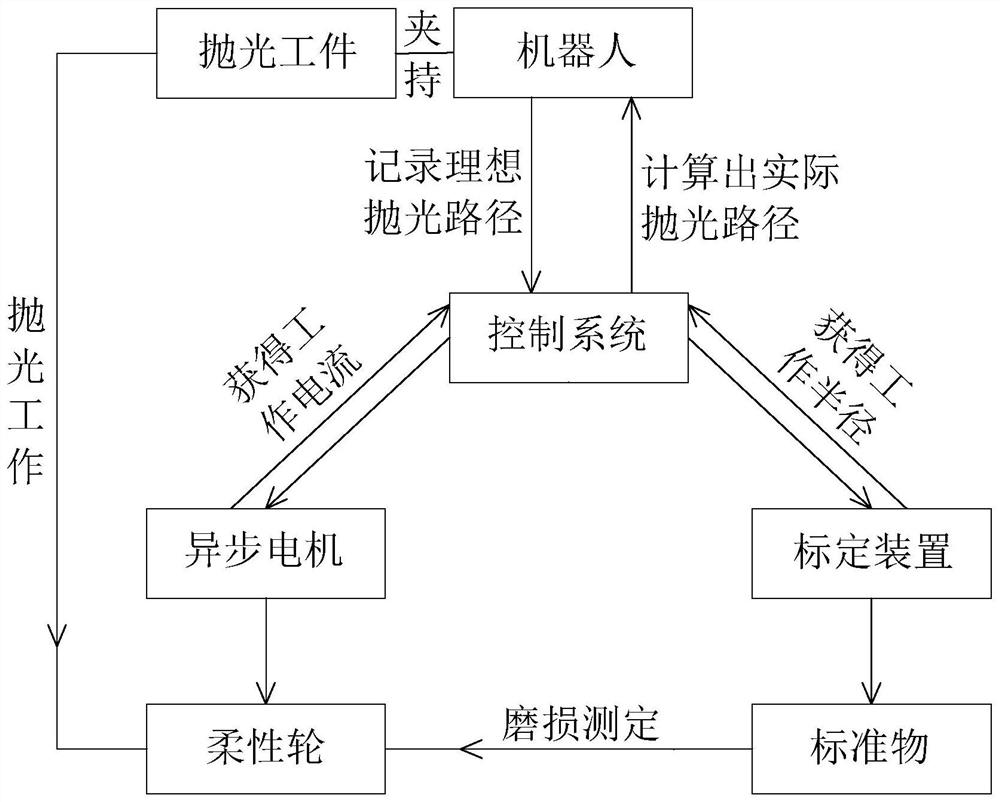
[0036] a. The PLC control system sets the parameters, starts...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More