Quad-rotor unmanned aerial vehicle attitude fault-tolerant control method considering unknown wind disturbance
A fault-tolerant control and aircraft attitude technology, which is applied in attitude control, three-dimensional position/channel control, sustainable transportation, etc., can solve the problems of limited range of controller adjustment, difficulty in achieving fast convergence characteristics, and difficulty in obtaining upper bound information of interference. , to avoid energy loss, improve flight safety, and wide adjustment range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The specific embodiments of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments.
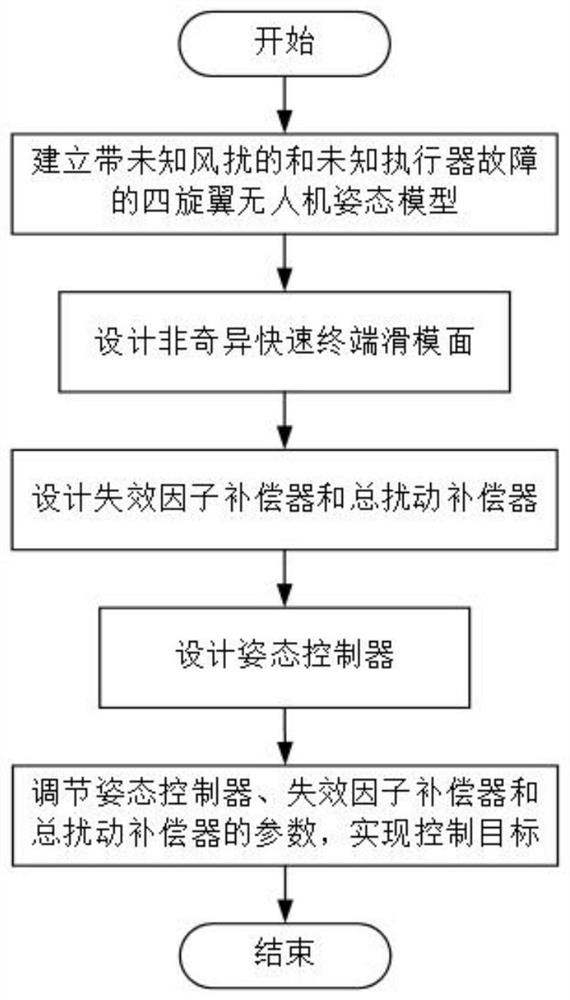
[0055] In this embodiment, an attitude fault-tolerant control method for a quadrotor UAV considering unknown wind disturbance is provided, and a total disturbance compensator is designed according to an adaptive mechanism; in response to partial failure of the actuator, a failure factor compensator designed by an adaptive mechanism is used. It can make the UAV handle the fault faster; using the improved non-singular fast terminal sliding mode control technology, an attitude controller is designed for the UAV to obtain fast convergence characteristics, and overcome the general fast terminal sliding mode control method. The conditional parameters are: odd limit, such as figure 1 shown, including the following steps:
[0056] An attitude fault-tolerant control method for a quadrotor UAV considering unknown wind disturba...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap