

Ground-air cooperative unmanned cluster search platform for unknown environment
An unknown environment and collaborative technology, applied in the direction of three-dimensional position/channel control, etc., can solve the problem of high application difficulty, achieve good scalability, reduce work pressure, and achieve high degree of coordination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
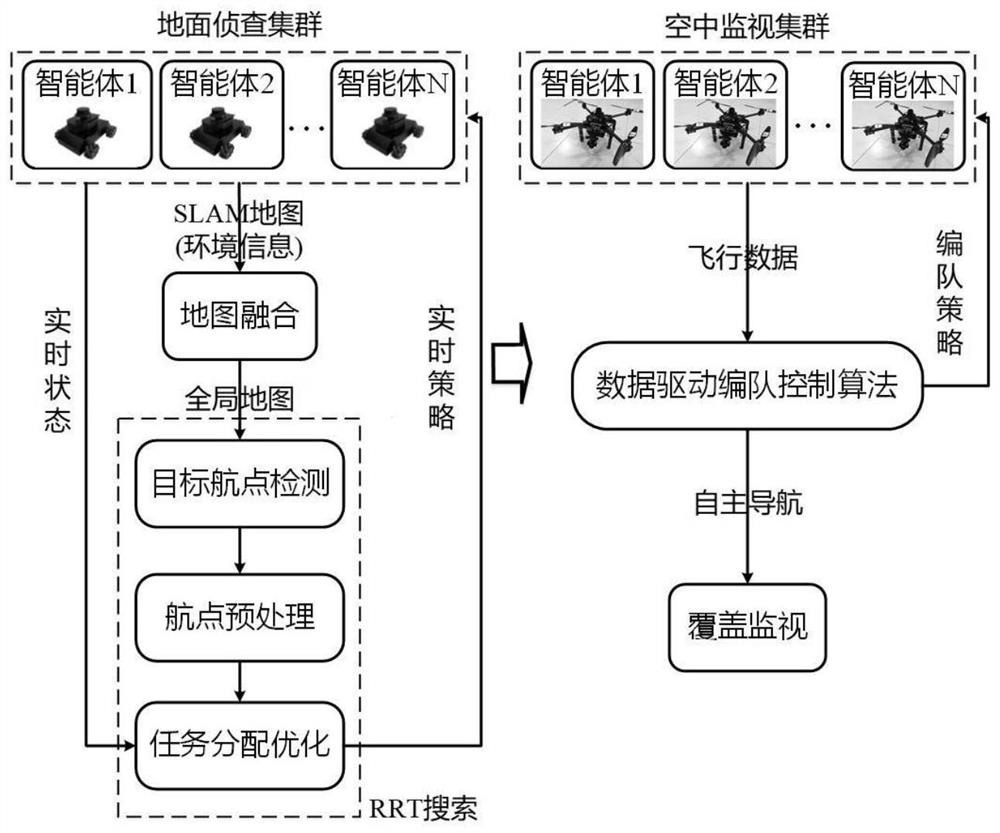
[0059] The embodiment of the present invention discloses a ground-air cooperative unmanned swarm search platform for unknown environments, based on ground unmanned vehicle swarms, aerial unmanned aerial vehicle swarms and communication networking. The car is equipped with an intelnuc as an onboard computer. Powered by a lithium battery, the battery life is about 3 to 4 hours. The omnidirectional wheel structure is adopted to facilita...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More