

Special robot for gripping ball thinwall brittle shell body
A manipulator and thin-walled technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of less freedom, failure to work normally, and inability to implement force control, etc., and achieve the effect of novel structure and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described in detail below in conjunction with the accompanying drawings.
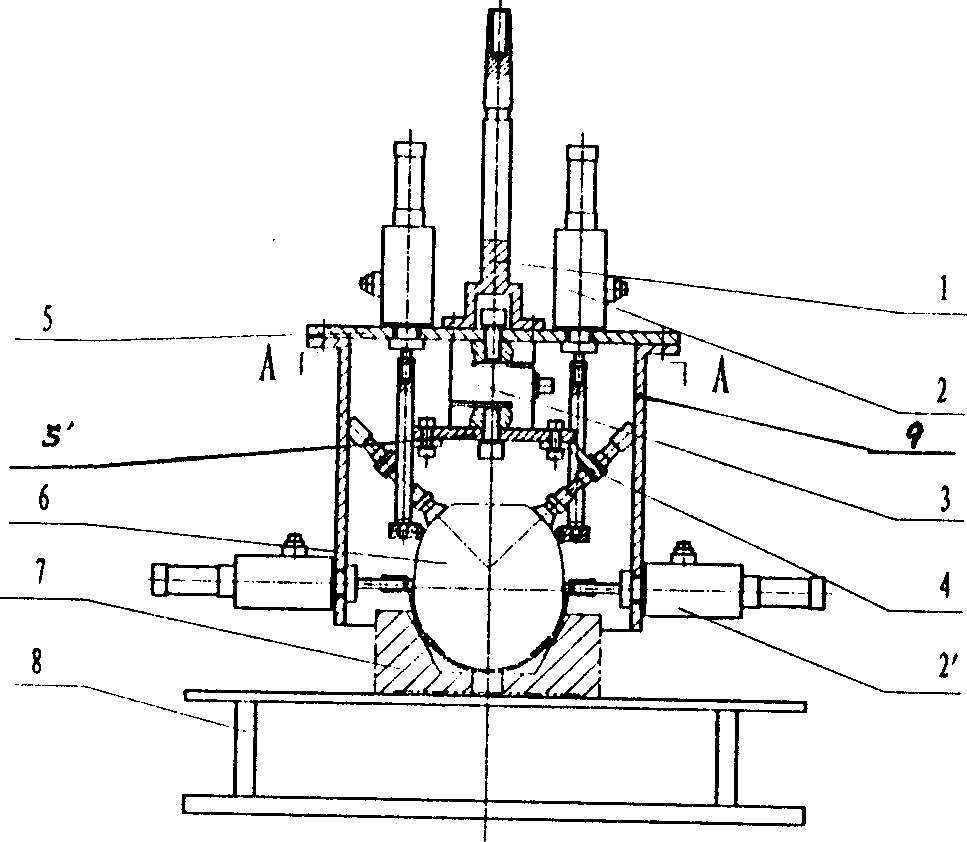
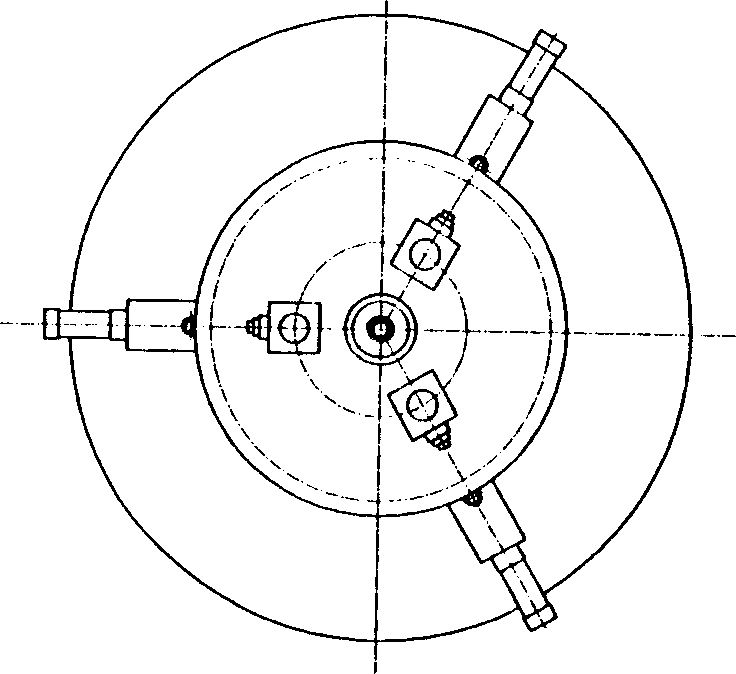
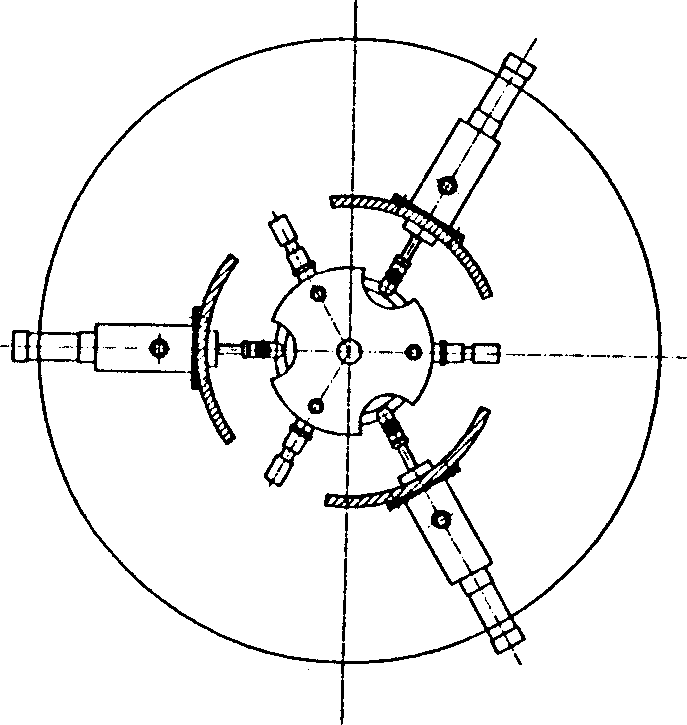
[0015] like figure 1 , 2 , 3, the present invention is composed of a taper shank 1, a positioning and locking cylinder, a pressure sensor 3, and a vacuum suction cup 4, wherein: the clamping taper shank 1 is installed in the center of the support plate A5, and the vacuum suction cup 4 and the support plate B5' pass through The rotating pair is connected, and the axis of the vacuum suction cup 4 is adjusted according to different workpieces 6 before work, so that it is coaxial with the normal direction of the outer surface of the pre-contact workpiece 6, and the pressure sensor 3 is located between the support plates A5, B5', and coaxial , On the upper surface of the support plate A5, there are evenly distributed positioning and locking cylinders A2, and a support plate 9 is installed below it. On the periphery of the pressure sensor 3, the positioning and lo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More