

Motion control apparatus and method, position instruction apparatus, position instruction method and control programme
A technology for controlling devices, moving vectors, applied in the field of photographic images, which can solve problems such as slow running
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
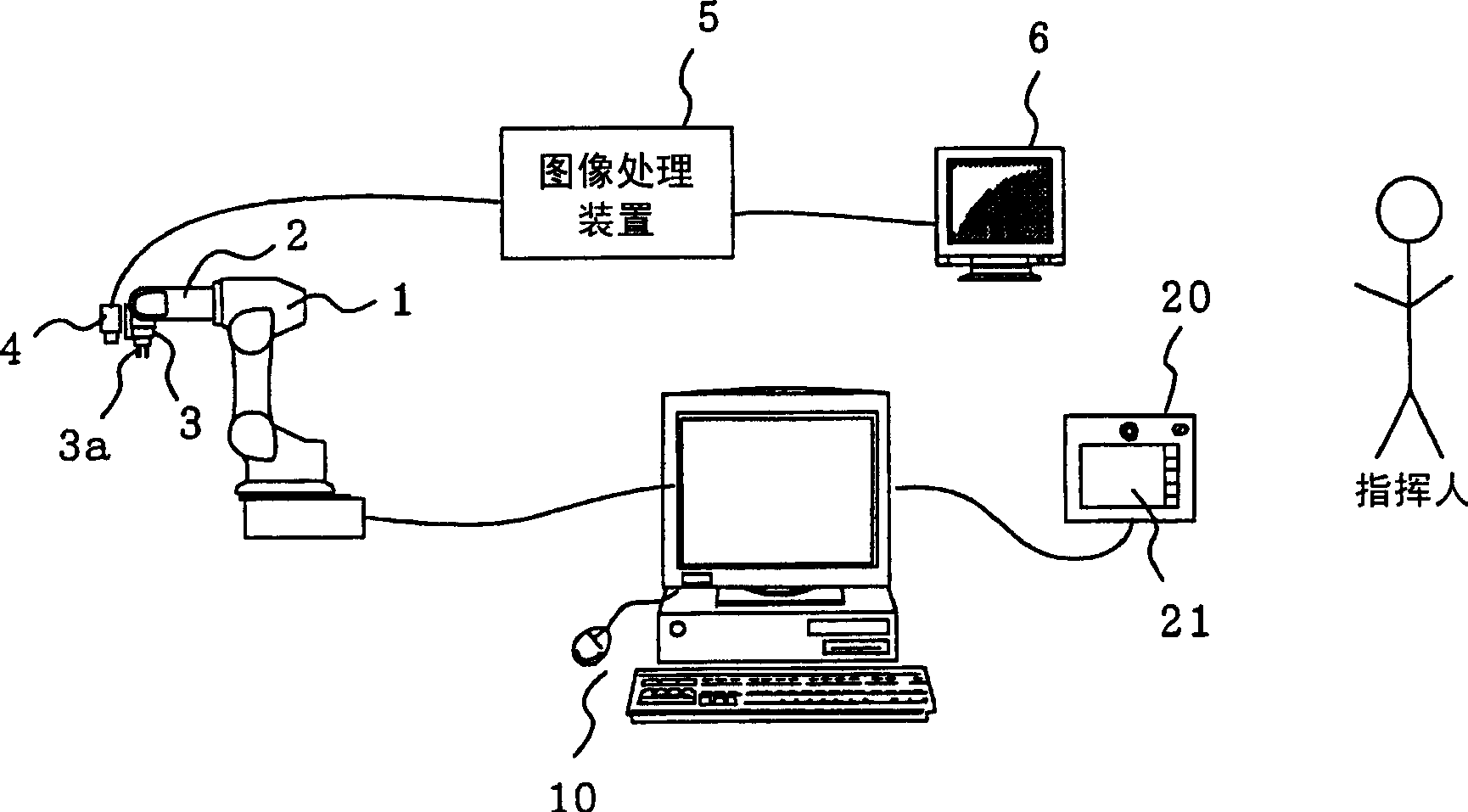
[0032] figure 1 It is a figure which shows the overall structure of the robot system to which the movement control apparatus for robot position command of embodiment of this invention is applied.
[0033] In this example, the robot 1 is composed of a multi-joint robot having a plurality of joints, and a robot finger 3 at the tip of an arm 2 is equipped with a working tool 3a capable of holding a workpiece and a camera 4 for imaging the workpiece. Images captured by camera 4 are processed by image processing device 5 and displayed on monitor 6 . In addition, the robot 1 , the robot control device 10 for controlling the robot 1 , the robot control device 10 , and the command operation device 20 for commanding and operating the robot 1 . All of these constitute a robot system.
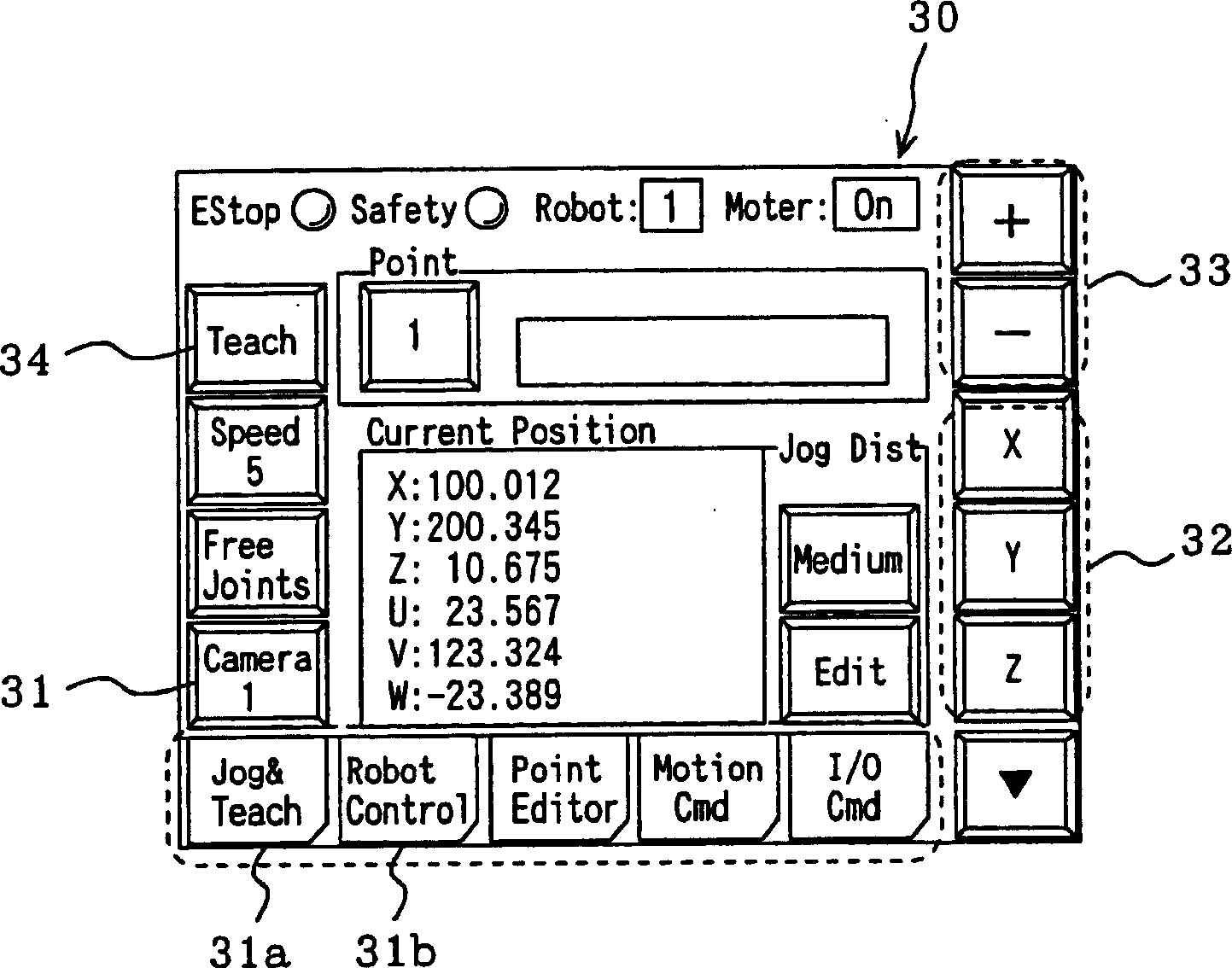
[0034] The command operation device 20 includes: image 3 and Figure 4As shown, a touch-panel display mechanism 21 that displays command images; a storage mechanism (not shown) that stores various i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More