

High-precision linear driver with arbitrary distance of run
A technology of linear drive and arbitrary stroke, which is applied in the muscle field of humanoid robots, can solve the problems of small output torque, small output force, and limited stroke, and achieve the effect of increasing output force, large output force, and reliable clamping action
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
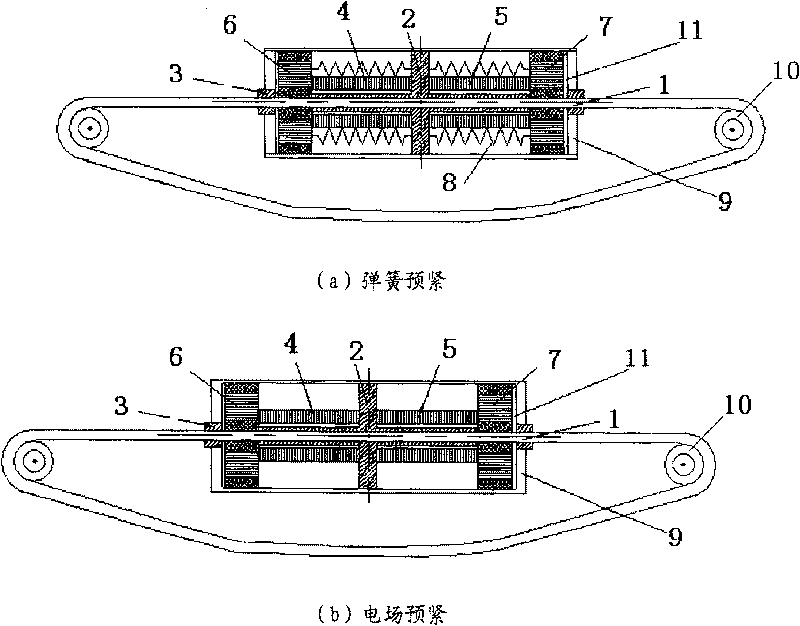
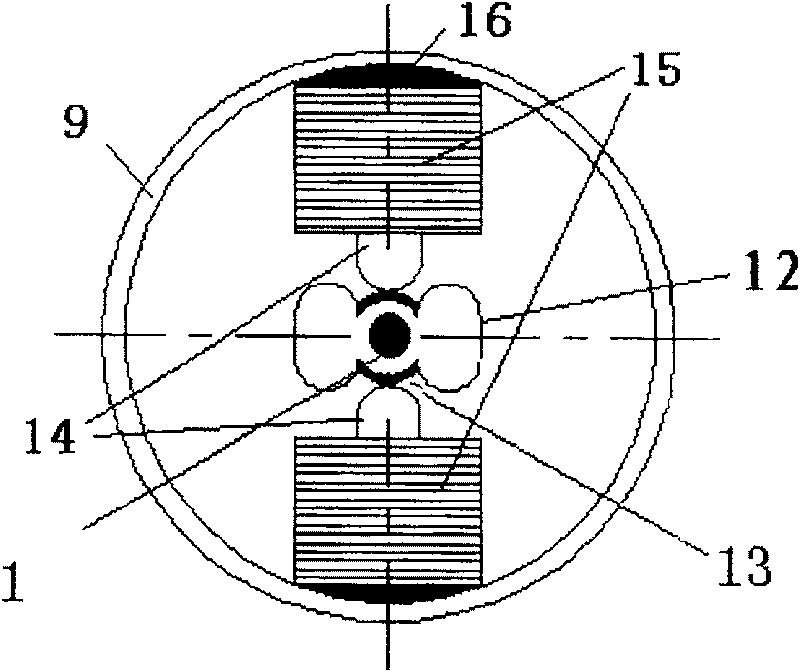
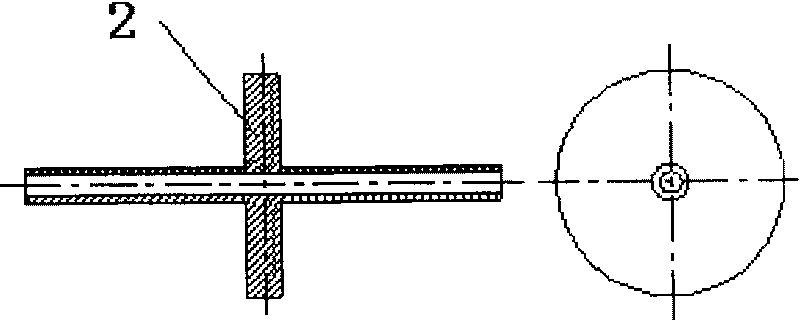
[0028] Such as figure 1 As shown in (a), it is mainly composed of a spring preloaded driver: a single-strand or multi-strand steel cable 1, the steel cable can be a fully enclosed ring or a line segment of a certain length; a guide support 2, a tubular guide part 3 ; The clamping mechanism includes a longitudinal telescopic clamping unit 6 and a longitudinal telescopic clamping unit 7; the axial telescopic mechanism includes a horizontal telescopic unit 4 and a horizontal telescopic unit 5. The clamping mechanism is fixedly connected with one end of the telescopic unit, and the other end of the telescopic unit is fixedly connected with the fixed part of the guide support 2 . The piezoelectric ceramic stack 15 in the clamping units 6 and 7 is prestressed by the spring 8, so that the piezoelectric ceramic stack 15 always works in a compressed state. 9 is the casing. 10 is the guide wheel of carrying steel cable, can install one or more guide wheels in the space, be installed i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More