

Basal lamina determination device
A technology for measuring devices and substrates, applied in measuring devices, optical testing of flaws/defects, material analysis through optical means, etc., can solve problems such as adjusting the deformation of the shooting mechanism, display device and workbench, to prevent dumping and support easily , the effect of stabilizing support
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
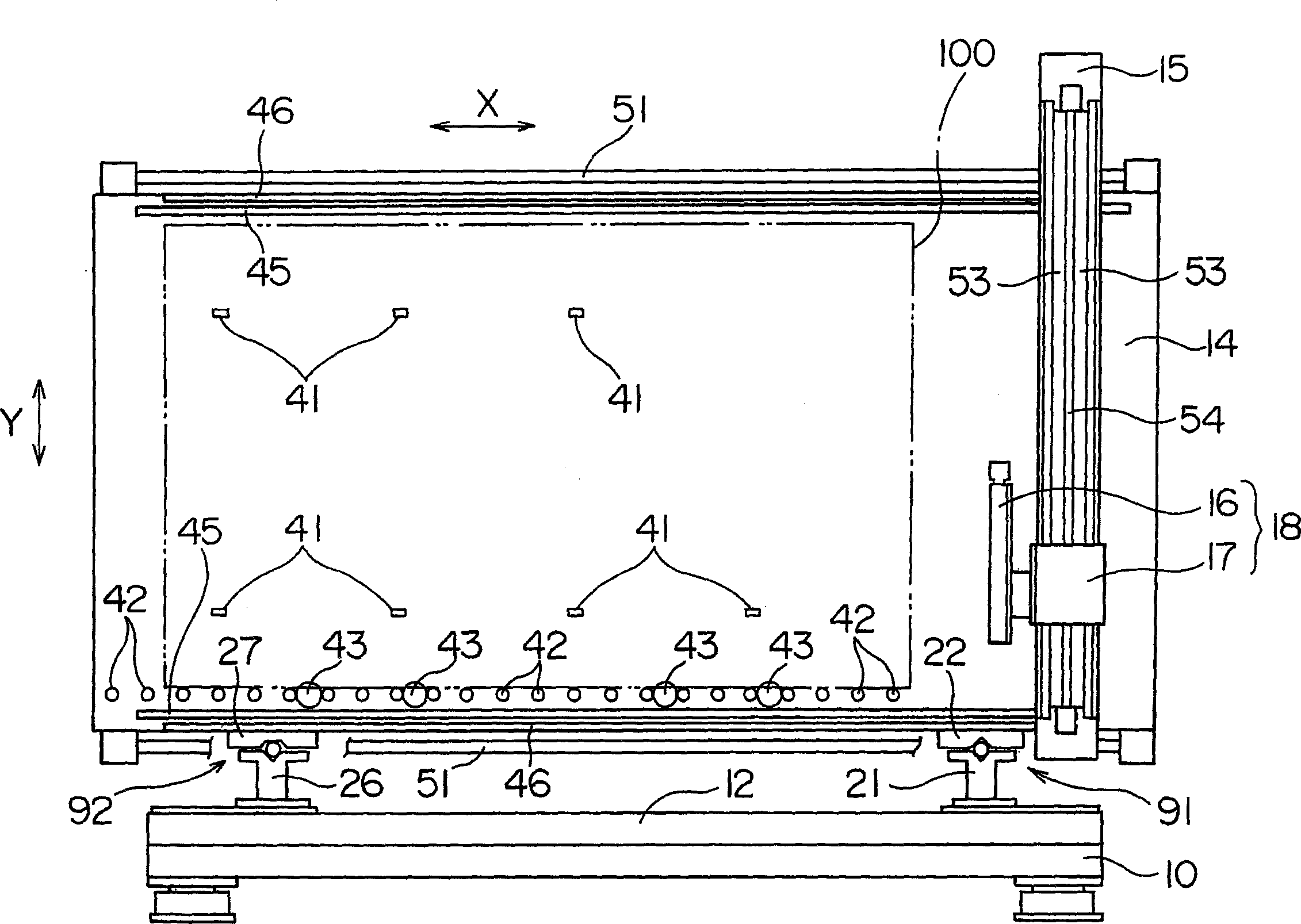
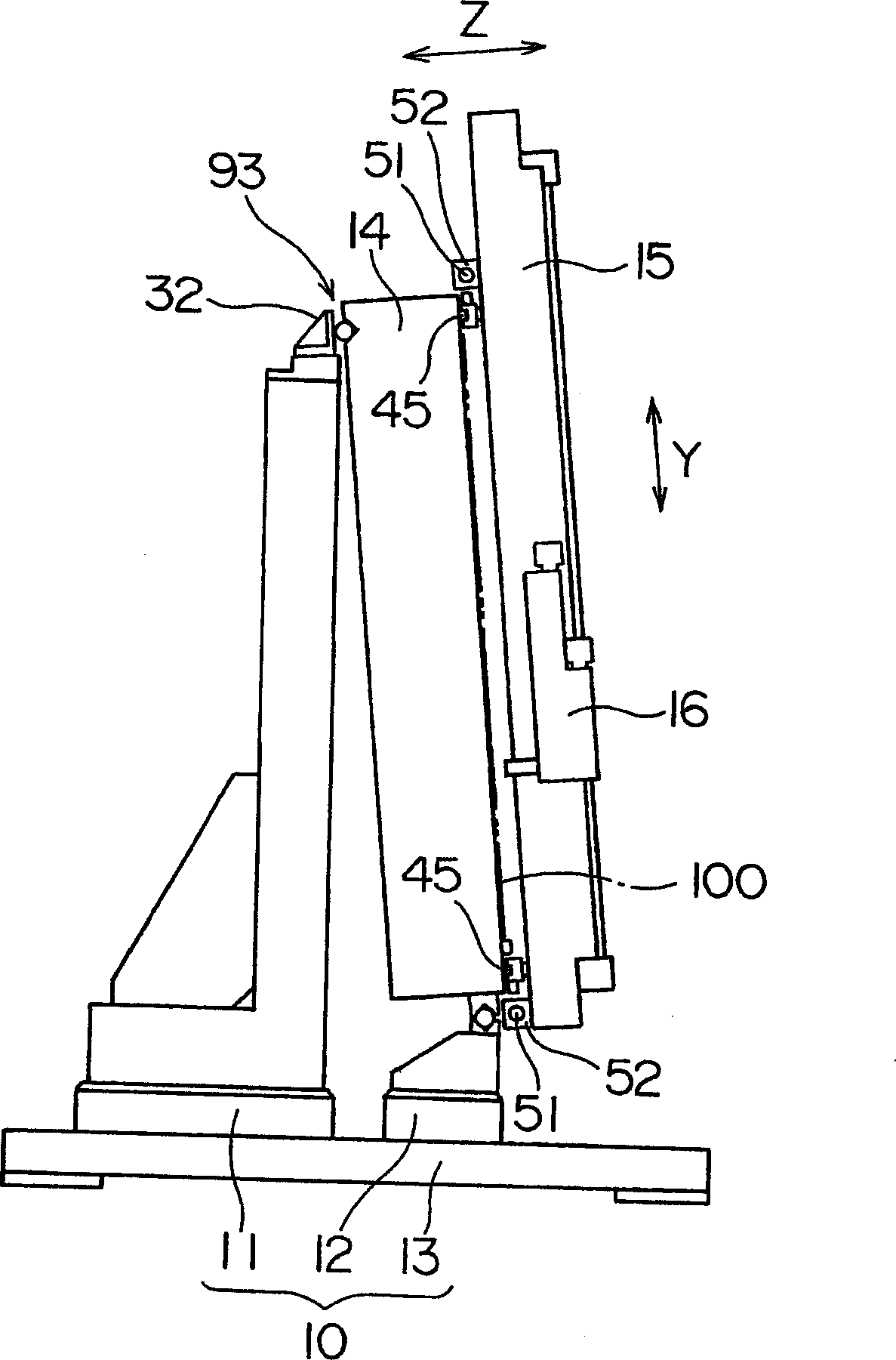
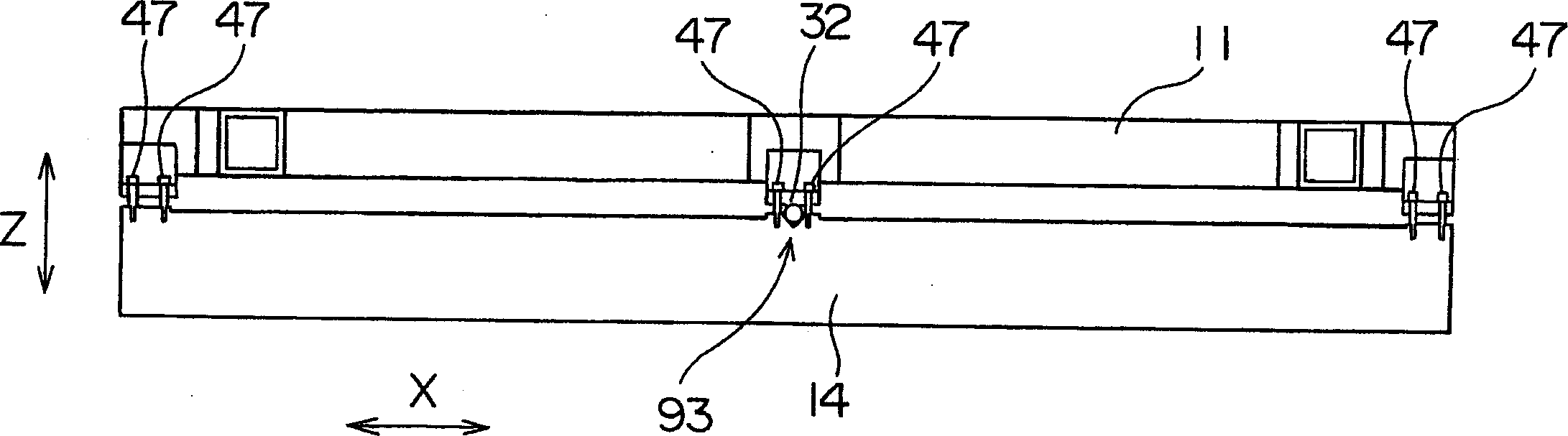
[0031] Hereinafter, embodiments of the present invention will be described based on the drawings. figure 1 It is a front view of a length measuring instrument as a substrate measuring device according to the present invention, figure 2 is its side view, image 3 is its top view. In addition, in image 3 Only the main parts of the first supporting member 11 and the stage portion 15 are shown in the figure, and other members are omitted.
[0032] This length measuring instrument has: a base 10 composed of a first support member 11, a second support member 12, and a base member 13; a stage portion 14 supported by the base 10; A stand 15 movable in the left and right directions; an imaging unit 18 composed of a photographing unit 16 and a moving member 17 connected to each other and movable in an up and down direction along the stand 15 .
[0033] Also, in this specification, as from Figure 1 to Figure 3 As shown, a three-dimensional coordinate system with the surface of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More