

Combinable robot article and its constituted foot unit
A robot joint and joint technology, applied in the field of robotics, can solve the problems of high processing cost, inability to change, change or expansion, etc., and achieve the effect of simple structure, avoiding redundancy, and facilitating standardization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0011] Below in conjunction with accompanying drawing and example the present invention is described in further detail.
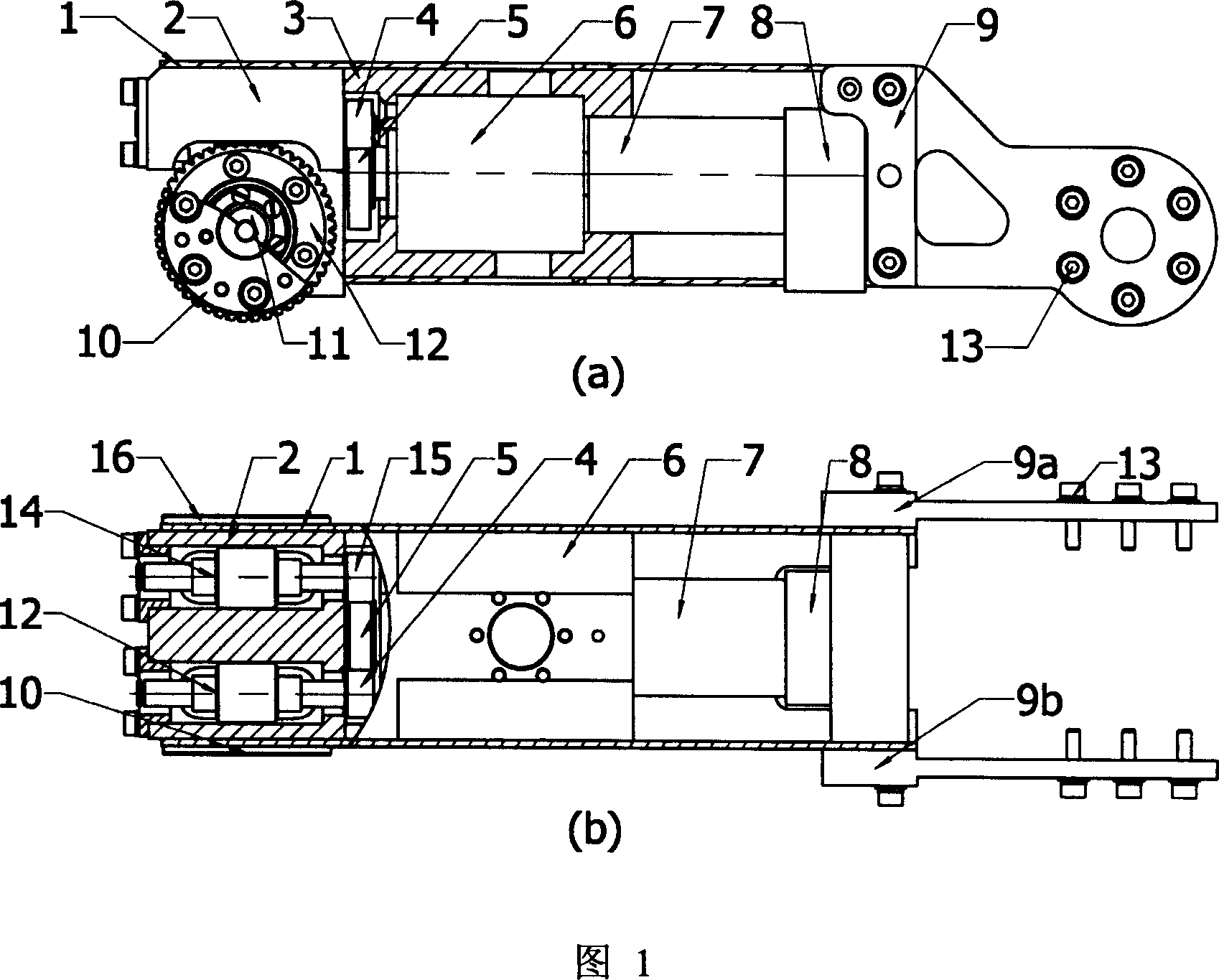
[0012] As shown in FIG. 1 , the robot joint of the present invention includes two parts, a transmission device and a sensor device.
[0013] The transmission mainly includes a motor 7 , a gear reducer 6 , a first spur gear 5 , a second spur gear 4 , a third spur gear 15 , a first steering reducer 12 and a second steering reducer 14 .
[0014] The motor bracket 3 is located in the housing 1 , the motor 7 and the gear reducer 6 are installed in the cavity of the motor bracket 3 , and the gear reducer 6 is located at the front end of the motor 7 . The front output shaft of the gear reducer 6 is connected with the first spur gear 5 . The second and third spur gears 4 and 15 are meshed with the first spur gear 5 . The steering reducer support 2 is connected to the front end of the motor support 3 by screws. The first steering reducer 12 and the second steerin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More