

Artificial joints using agonist-antagonist actuators
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
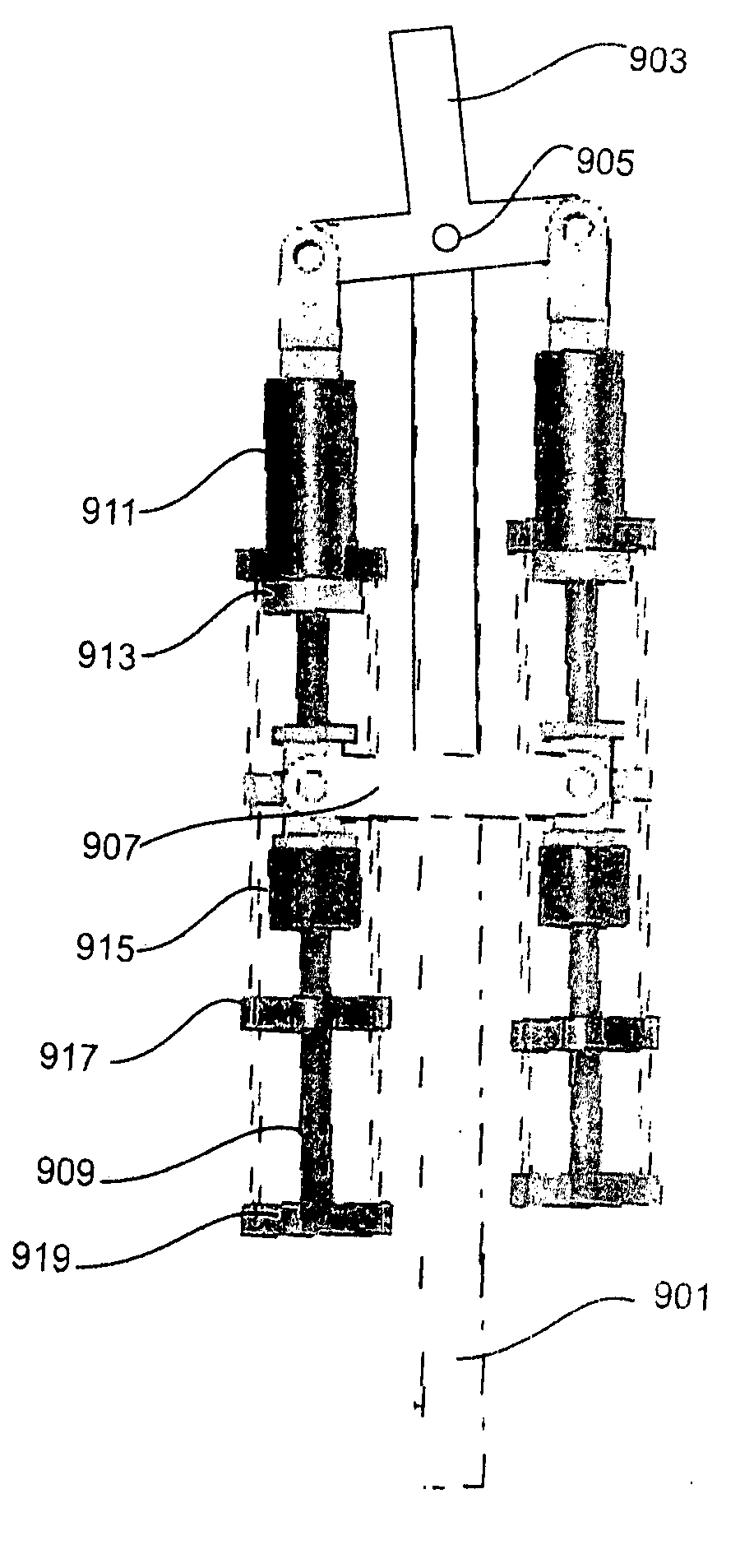
[0070] In the construction of a biologically realistic limb system that is high performance, light weight, quiet and power efficient, a agonist-antagonist actuator design is proposed herein comprising a plurality of actuators and series elastic structures. Since it is desirable to minimize the overall weight of the limb design, the efficiency of the agonist-antagonist actuator design is critical, especially given the poor energy density of current power supplies, e.g. lithium-ion battery technology. By understanding human biomechanics, the lightest, most energy efficient agonist- antagonist actuator design can be achieved.
[0071] In the next section, the key features of biomechanical systems are highlighted. A more complete description of biomechanical systems is found in the patent applications cited in the foregoing “Cross Reference to Related Applications” whose disclosures are incorporated herein by reference.
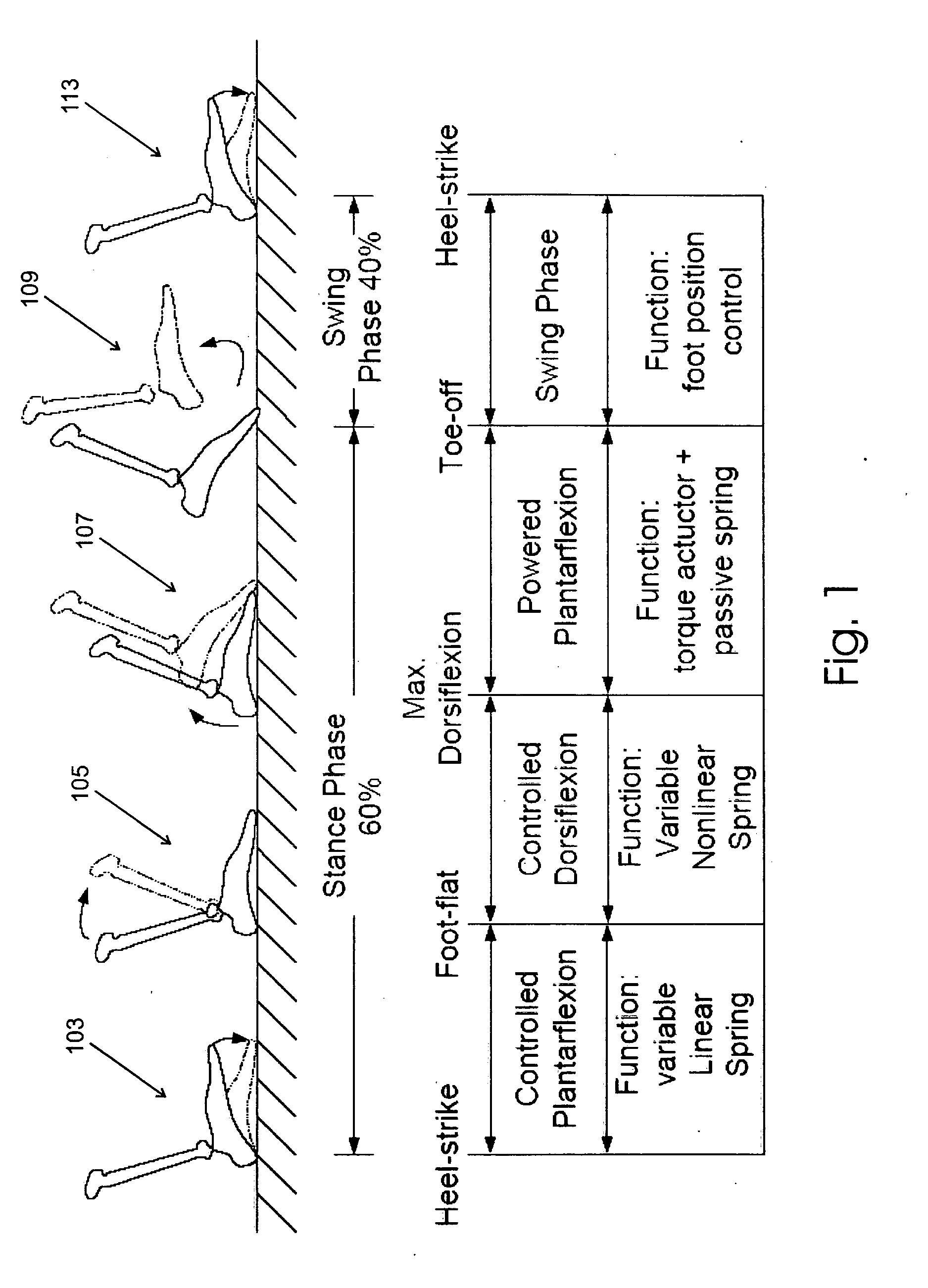
[0072] Joint Biomechanics: The Human Ankle
[0073] Understanding norma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More