

Ultra-large-scale UAV cluster control system and method for imitating pigeon intelligent behaviors
A super-large-scale, cluster control technology, applied in the direction of finding the target control, etc., can solve the problems of increased complexity of manual control, increased difficulty of information interaction, and large number of wingmen
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0093] The effectiveness of the method proposed by the present invention is verified below through a specific example of a UAV cluster. The experimental computer configuration is i5-5200U processor, 2.20GHz main frequency, 4G memory, and the software environment is Matlab of R2016a version.
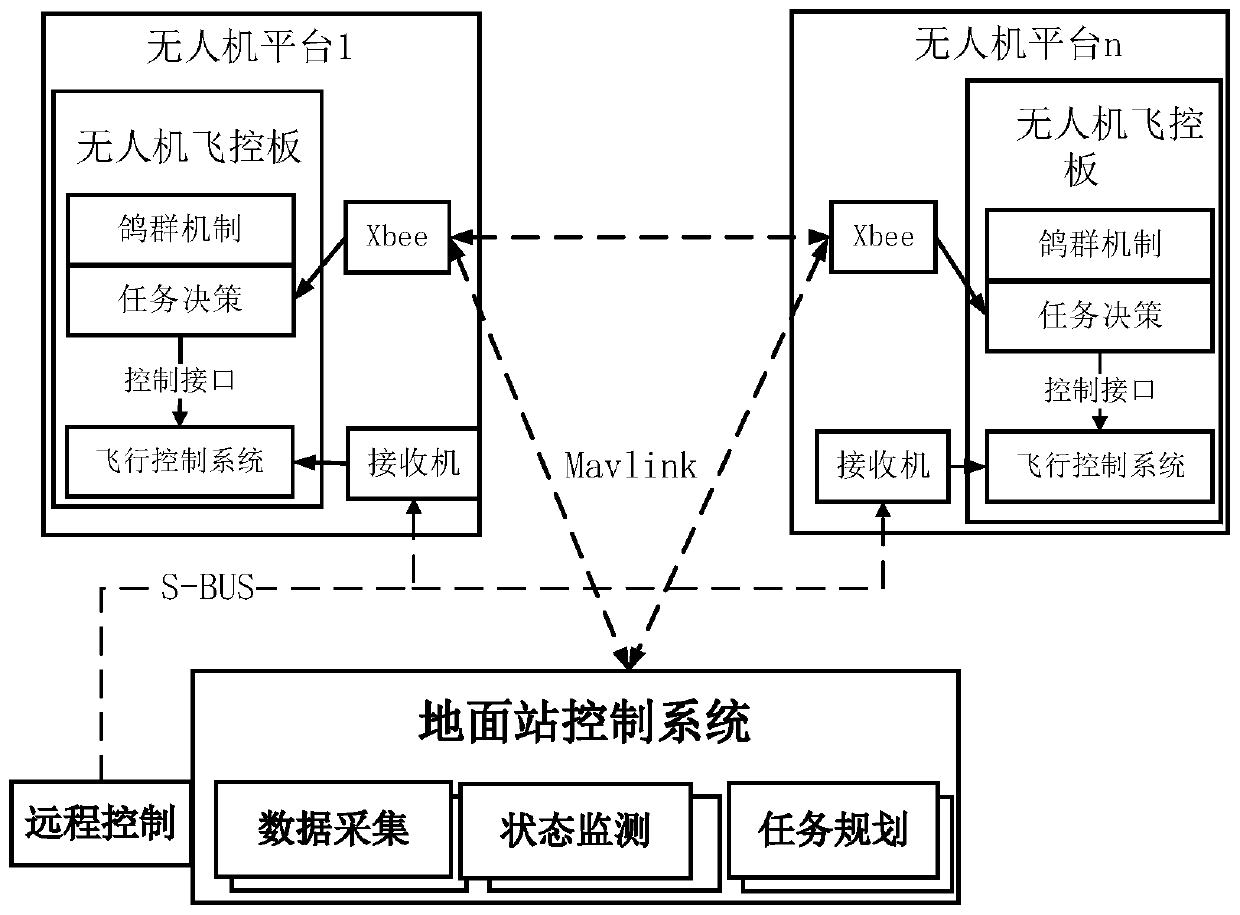
[0094] The framework of a super-large-scale UAV swarm control system imitating the intelligent behavior of homing pigeons is as follows: figure 1 shown. The drone is a quadrotor; the control system at least includes a flight control board, a data communication and processing module, and a receiver arranged on each drone; the quadrotor flight control includes attitude control, Speed control, position control, state estimator, multi-sensor data fusion and fault protection are mainly implemented by the processor on the flight control board. Ardupilot, an open-source flight control system, is set on the flight control board. It supports multiple flight modes (stabilized, loitering, guid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More