

Gripper for an automated manipulator and method for operation of the gripper
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
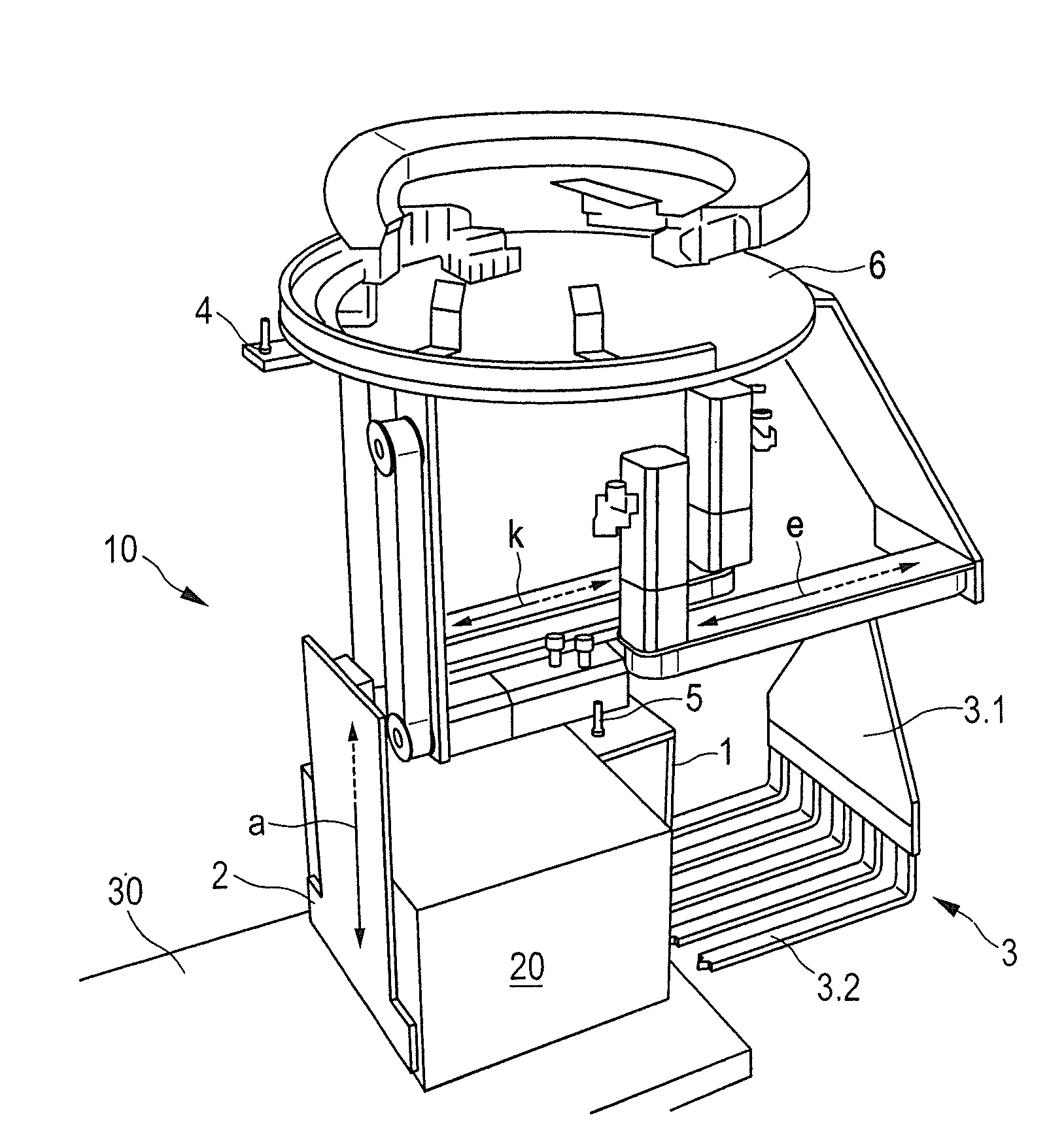
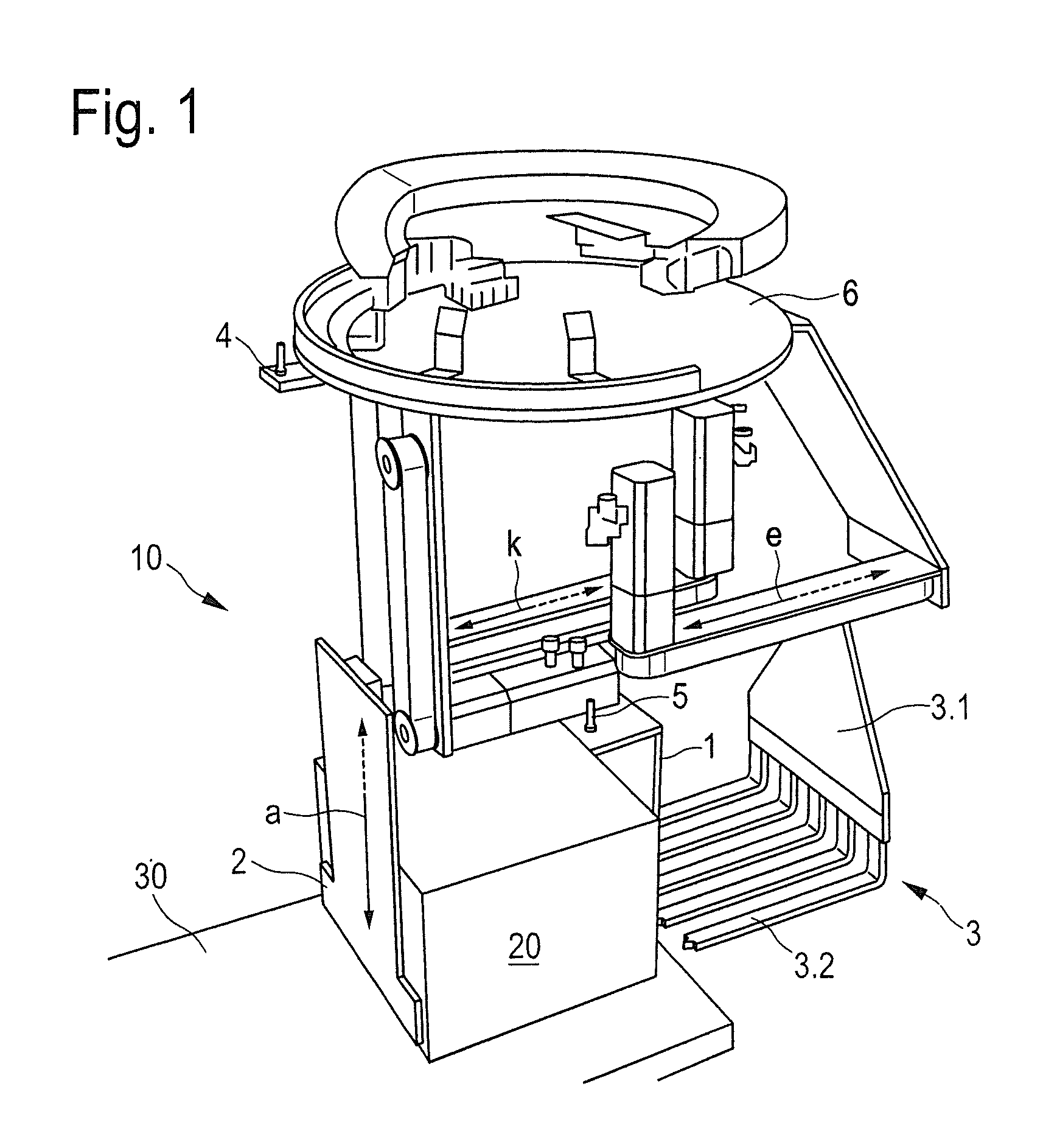
[0041]FIG. 1 shows a manipulator gripper 10 for palletizing and depalletizing bundles 20 by means of an articulated arm robot (not shown). It comprises a tool flange 6 for connection to the articulated arm robot. A trailing cable installation enables rotation movements by ±225°.
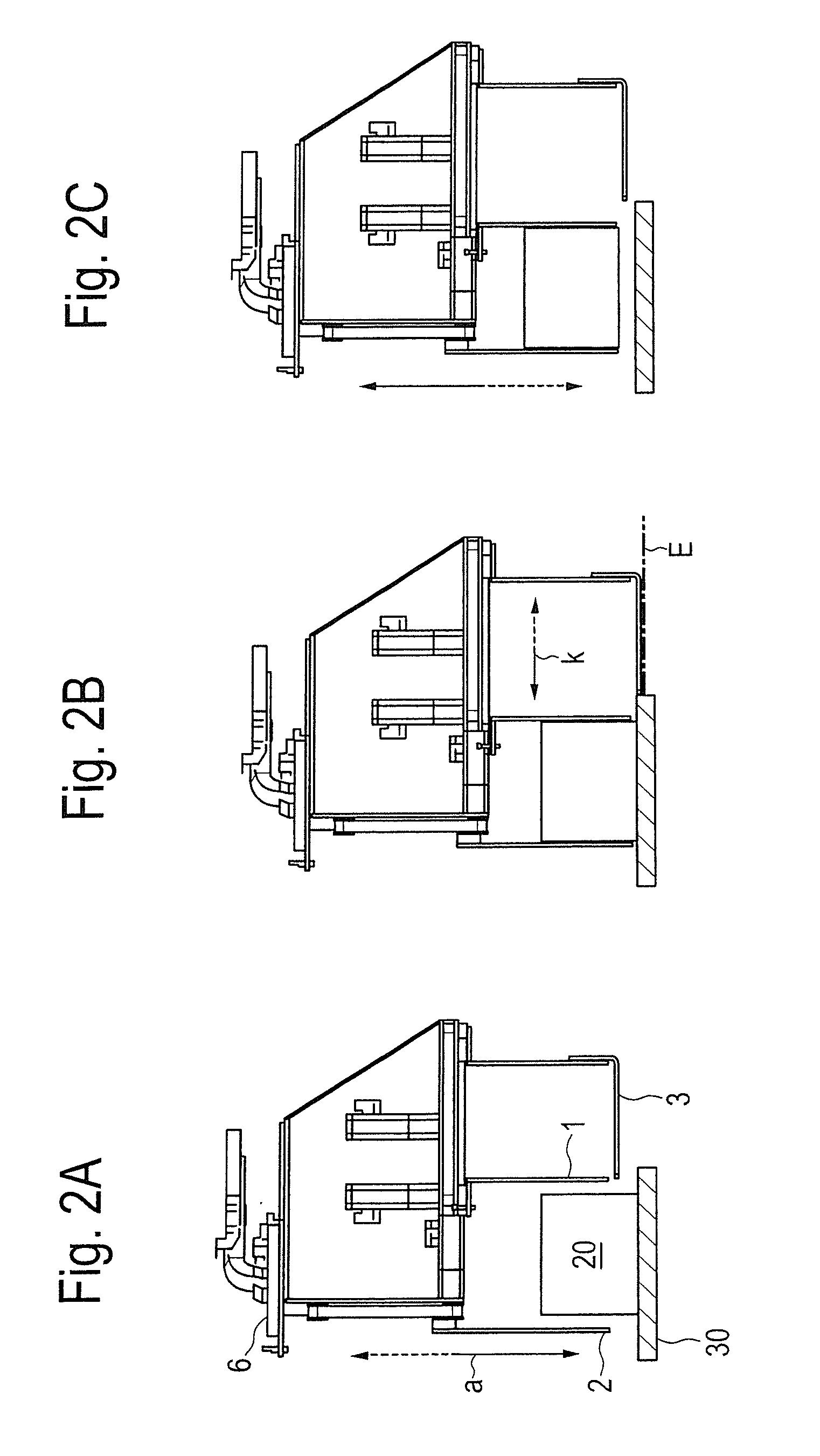
[0042]A bent support base 3 with its angle flange 3.1 is borne on the tool flange 6 such that said support base 3 can be shifted, and extends with a support plate 3.2 in an insertion plane E (see FIG. 2B) towards a counter-stop 2. This can be shifted on a lowering axis a towards the insertion plane E of the support base 3. A clamp stop 1 extends parallel to the counter-stop 2 along the lowering axis a and can be shifted relative to the tool flange 6 and the support base 3 along a clamp axis k towards the counter-stop 2. The support base 3 can be shifted, relative to the tool flange 6, towards the counter-stop 2 in the insertion plane E along an insertion axis essentially parallel to the clamp axis k.
[0043]Low...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Shape | aaaaa | aaaaa |
| Distance | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More