

Autonomous surface treating appliance
a technology for treating appliances and surfaces, applied in steering controls, non-vehicle mounted steering controls, braking systems, etc., can solve problems such as difficulty in turning a robot on the spot, and achieve the effects of improving traction, maintaining strong traction, and enhancing the drive arrangemen
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
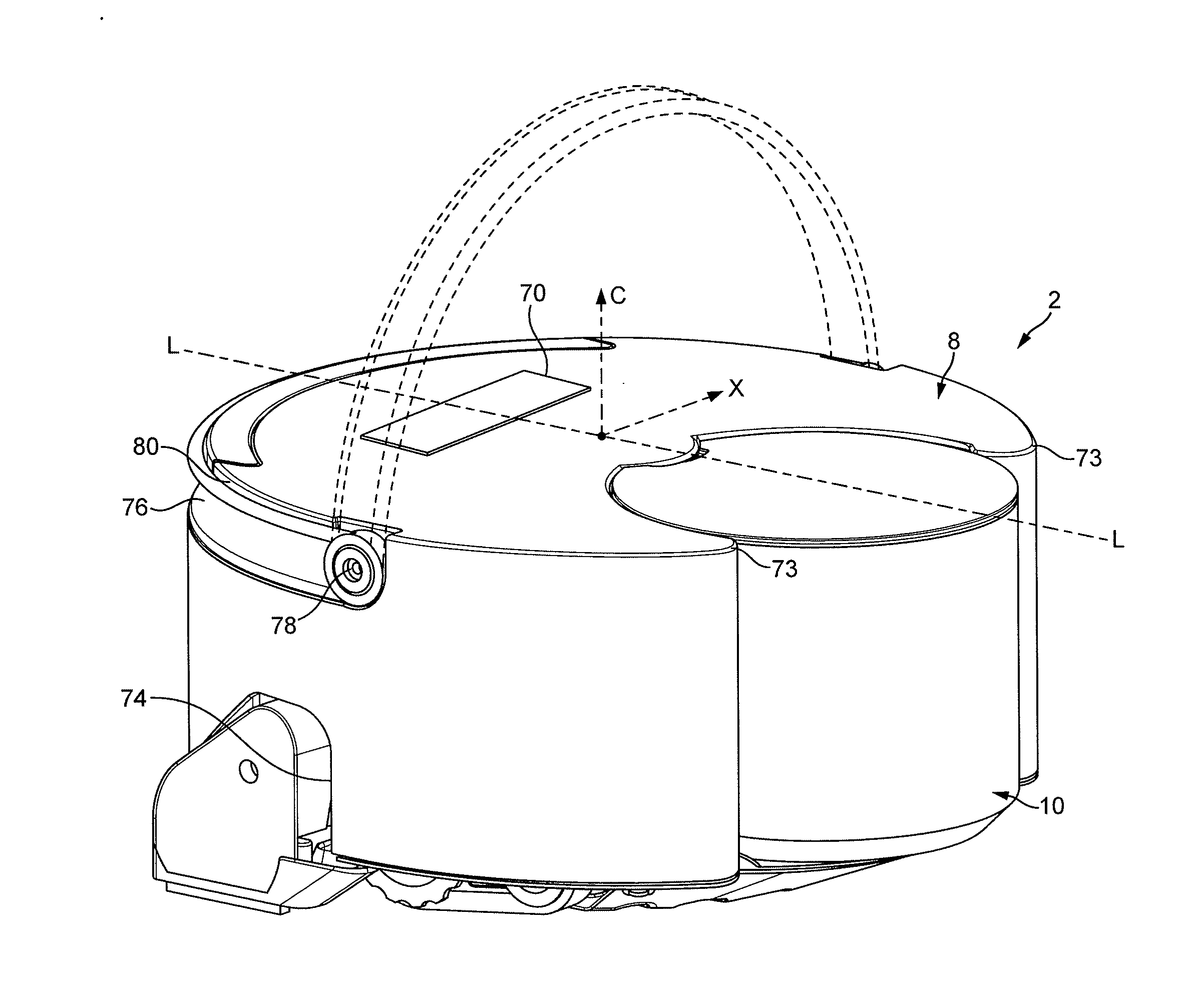
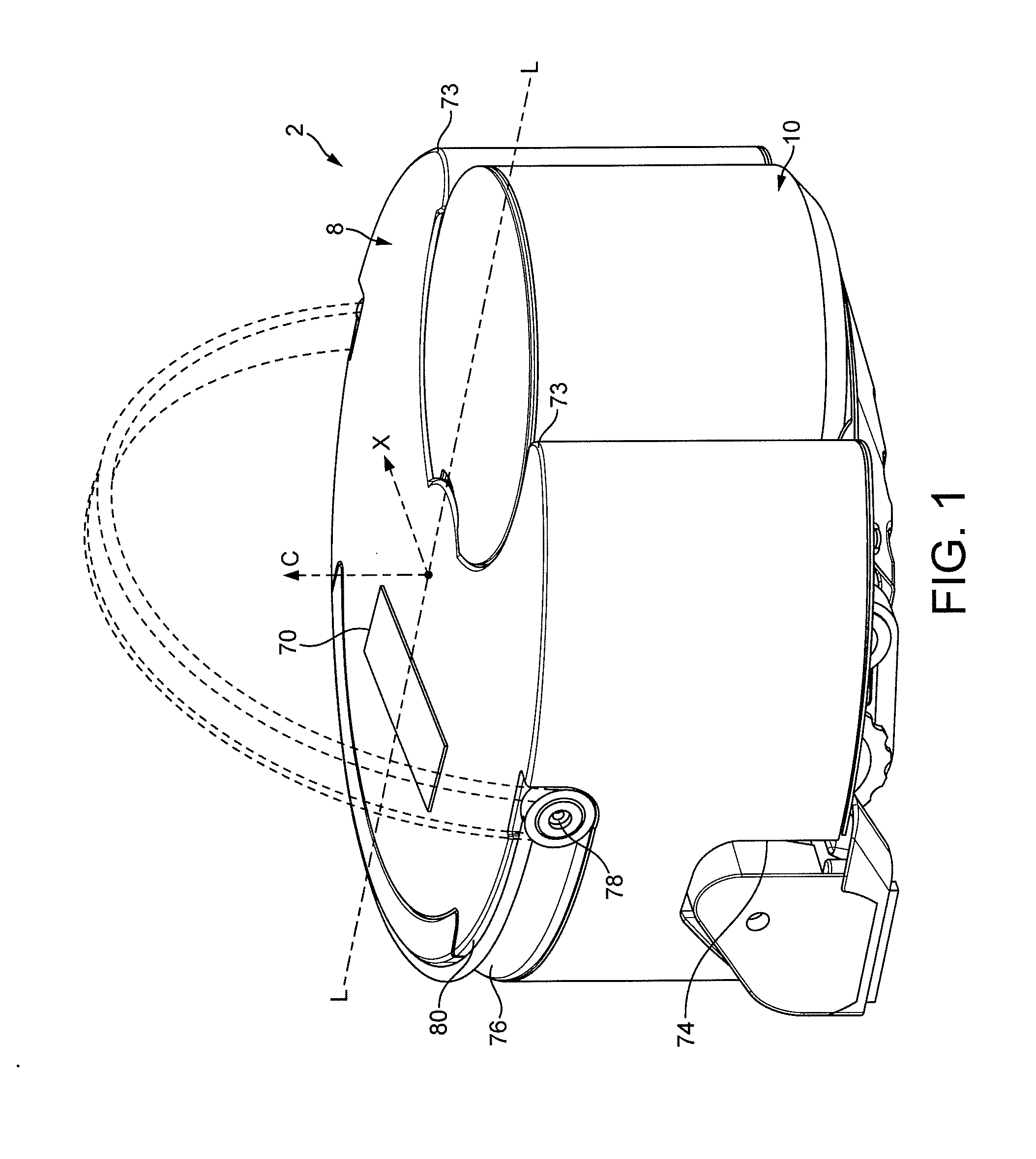
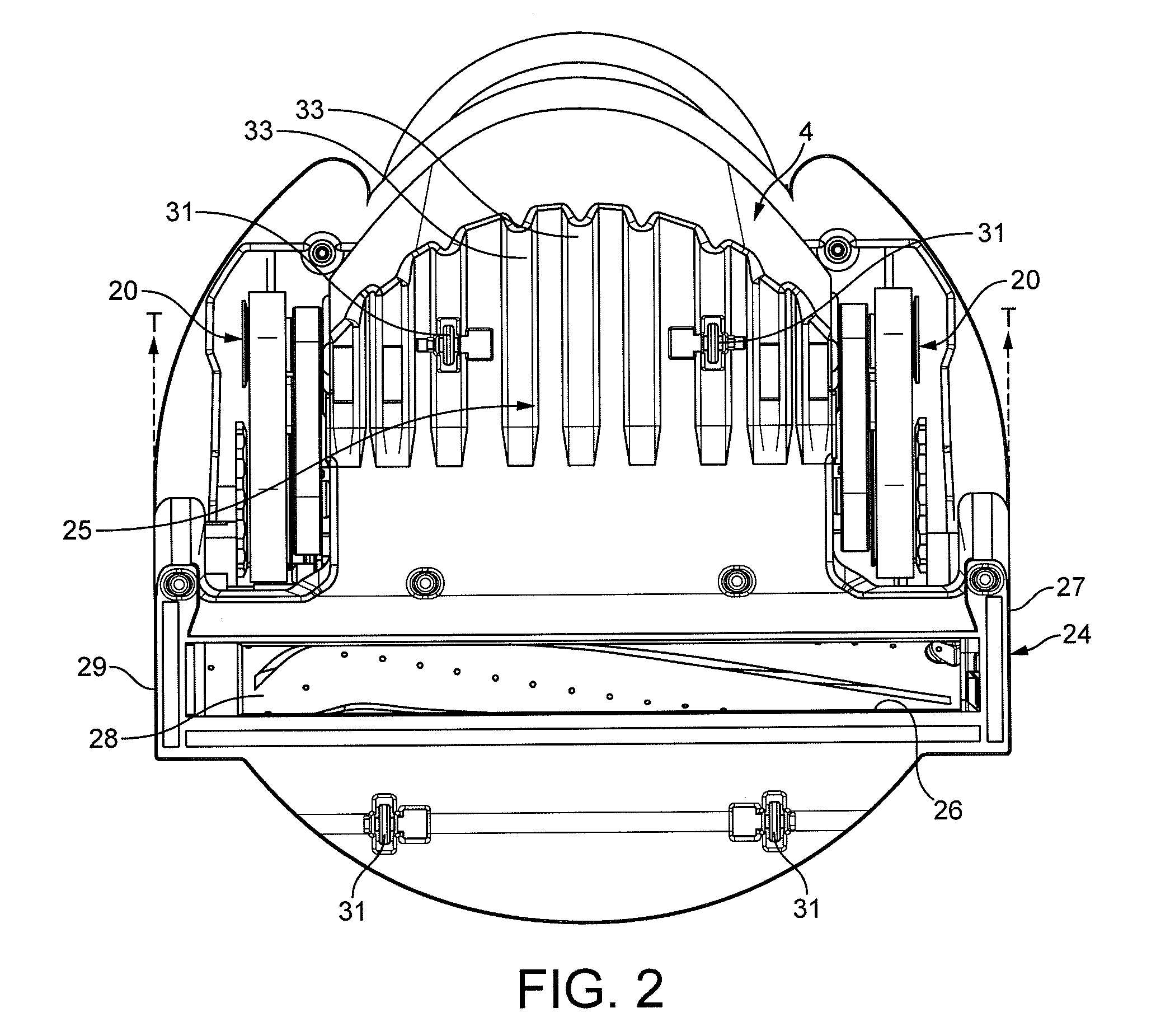
[0032]With reference to FIGS. 1, 2, 3, 4 and 5 of the drawings, an autonomous surface treating appliance in the form of a robotic vacuum cleaner 2 (hereinafter ‘robot’) comprises has a main body having four principal assemblies: a chassis (or sole plate) 4, a body 6 which is carried on the chassis 4, a generally circular outer cover 8 which is mountable on the chassis 4 and provides the robot 2 with a generally circular profile, and a separating apparatus 10 that is carried on a forward part of the body 6 and which protrudes through a complementary shaped cut-out 12 of the outer cover 8.
[0033]For the purposes of this specification, the terms ‘front’ and ‘rear’ in the context of the robot will be used in the sense of its forward and reverse directions during operation, with the separating apparatus 10 being positioned at the front of the robot. Similarly, the terms ‘left’ and ‘right’ will be used with reference to the direction of forward movement of the robot. As will be appreciated...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More