

Determining a unique spatial relationship of a medical device to a further object
a medical device and spatial relationship technology, applied in the field of determining the unique spatial relationship of a medical device to an object, can solve the problems of affecting the accuracy of the robotic minimally invasive surgical intervention, the inability to register using a contact-free method in an image-based manner, and the inability to accurately determine the accuracy of the robotic intervention, so as to increase the safety and the safety of the operation. , the effect of enlarge the field of application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
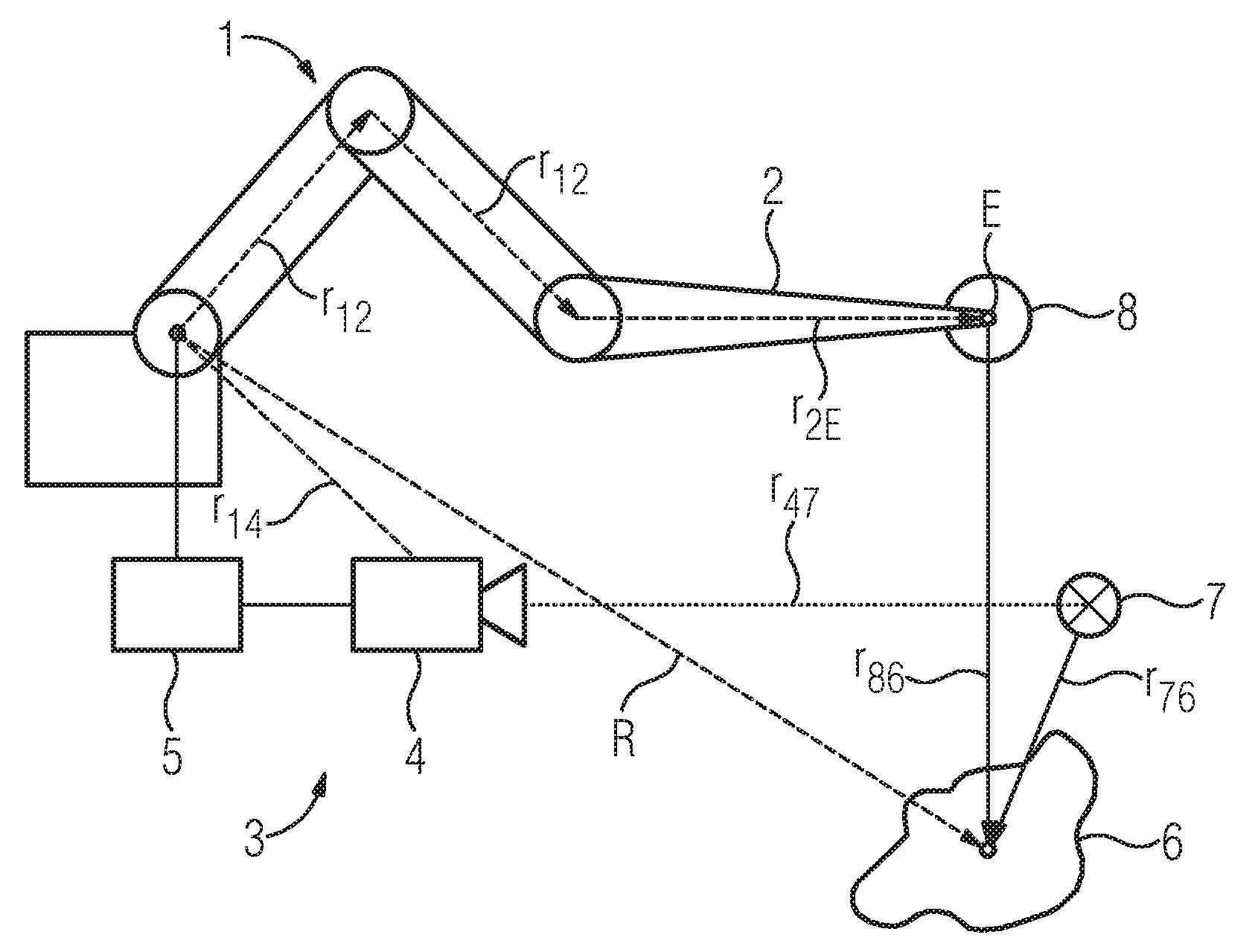
[0026]FIG. 1 is a schematic representation of a method for determining a unique spatial relation with reference to a medical device in a first exemplary embodiment.
[0027]The medical device 1 is provided as a robotic medical device 1 and includes an end effector 2. A registration mechanism 3 (e.g., a camera 4 and a control mechanism 5) is also included in the medical device 1. The medical device ay be registered to an object 6. A unique spatial relation R of the medical device 1 (e.g., a base of the medical device 1) to the object 6 is determined. As depicted in FIG. 1, two reference positions 7 and 8 are used, which are in known spatial relations r76 and r86 to the object 6.
[0028]As depicted in FIG. 1, first a dotted line symbolizes the acquisition of the optical reference position 7 and the spatial relation r47 of the camera 4 to the reference position 7. Because the spatial relation r14 between the camera 4 and medical device 1 (e.g., the base of the medical device 1) is known, it...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More