

Means for driving active turning-up crawler robot to walk
A walking-driven, crawler-type technology, applied in the field of robotics, to achieve the effect of reducing components, reducing costs, and increasing operating speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings.
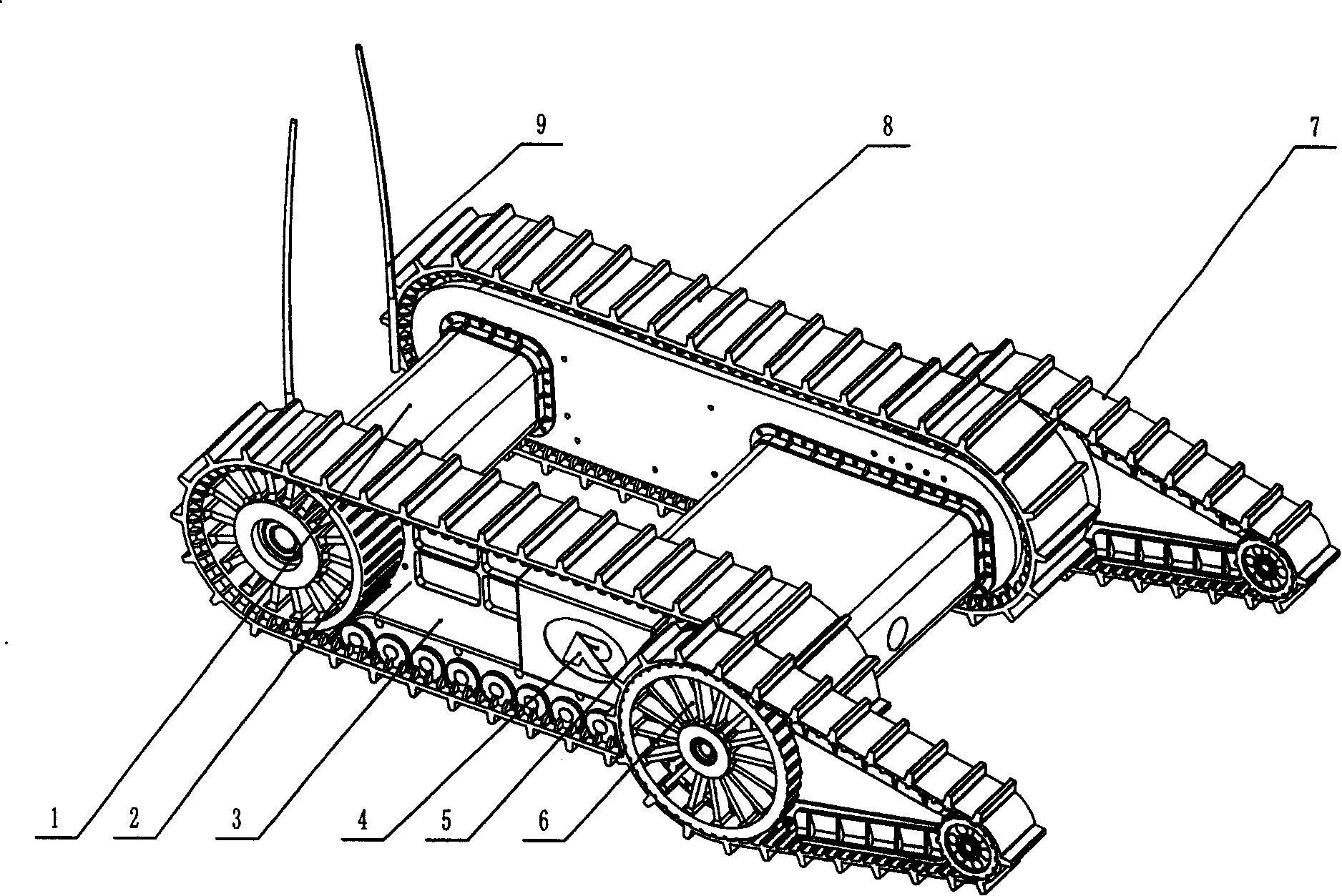
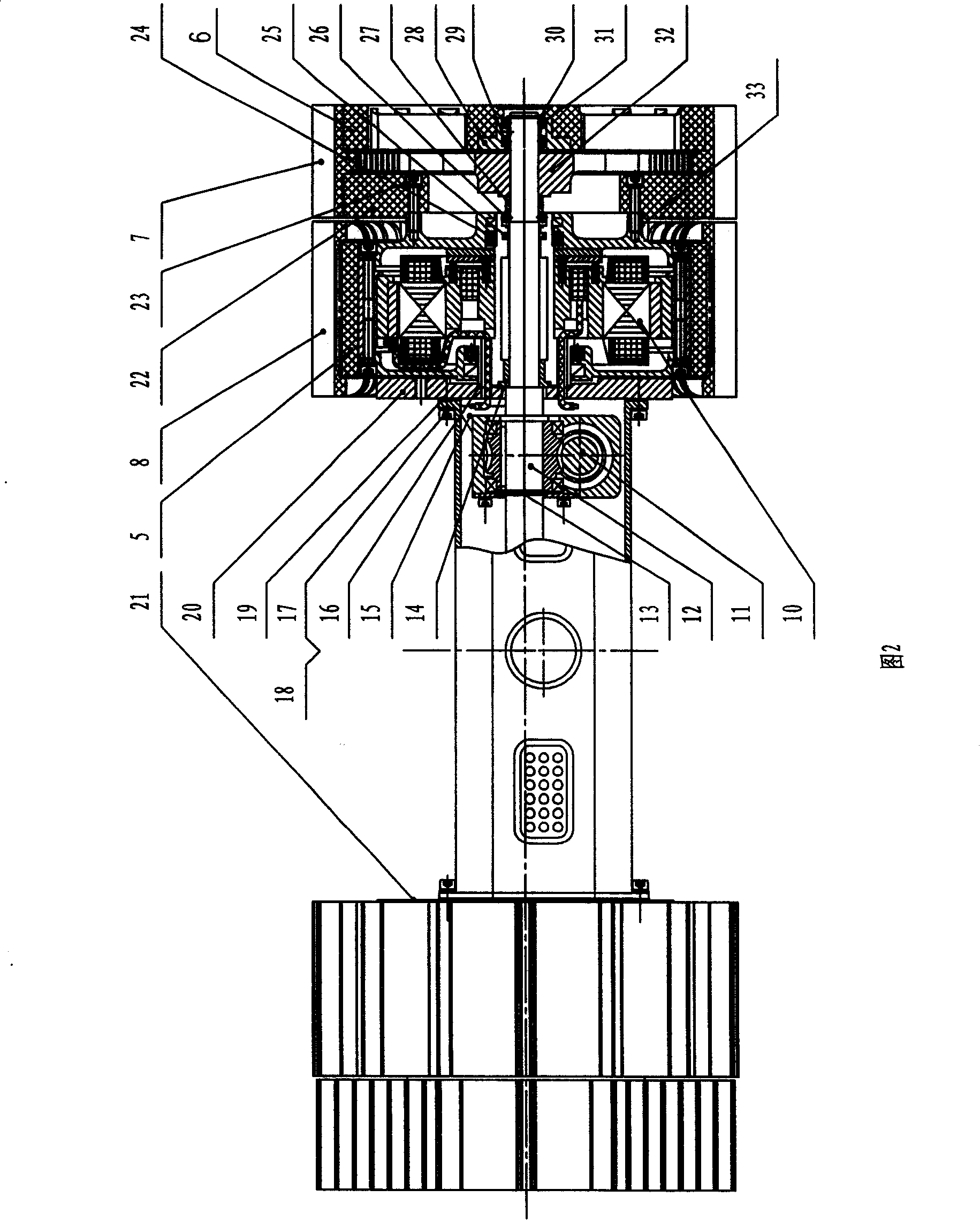
[0020] The walking driving device of the autonomous turning crawler type robot of the present invention comprises a body 1, a driving wheel 5 arranged symmetrically left and right, a driven wheel 2, and a walking track 8. The driving wheel 5 is provided with an outer rotor brushless motor 10, and the outer rotor brushless The center of the motor 10 is provided with a hollow shaft 16, and the outer rotor is fixed on the hollow shaft 16 through a bearing. The rotor brushless motor 10 rotates coaxially, the balance wheel 22 drives the balance wheel track 7, the balance wheel track 7 is tensioned by the balance wheel tensioner 38 and the balance wheel support block 39, and the two ends of the hollow shaft 16 are provided with sliding bearings 14 And the rolling bearing 24, the swing arm shaft 12 passes through the sliding bearing 14 and the rolling bearing 24, the outside ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More