

Underwater bionic robot cooperated transportation method
A bionic robot and transportation method technology, applied in the field of multi-robot collaborative transportation, can solve the problems of large interference in water, difficulty in establishing a hydrodynamic model for underwater robot control, and many uncertain factors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
[0066] The present invention divides the cooperative transportation problem into four sub-problems to solve: 1. pose control; 2. path planning; 3. synchronous control; 4. transportation direction control. The bionic robot fish is taken as an example below for illustration.
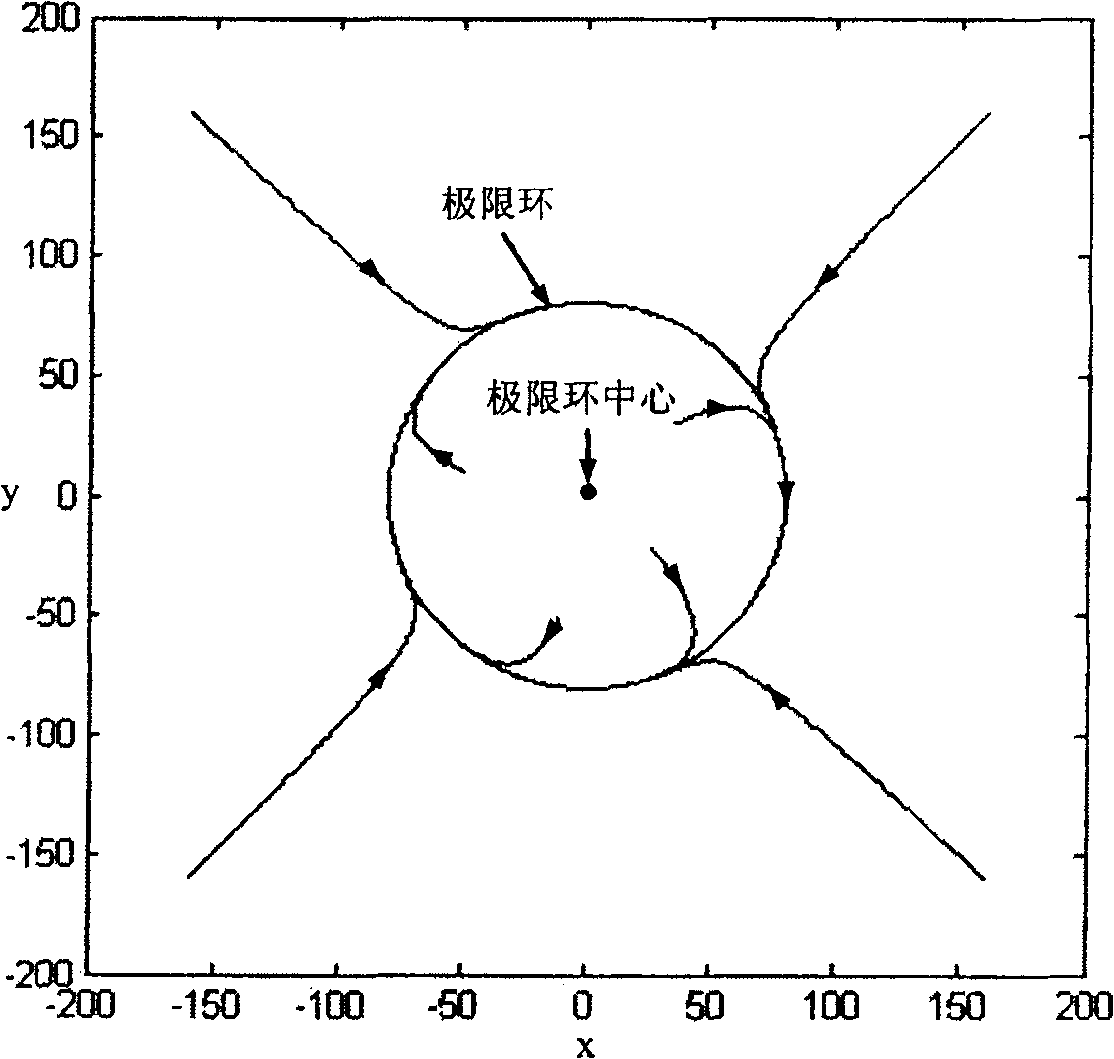
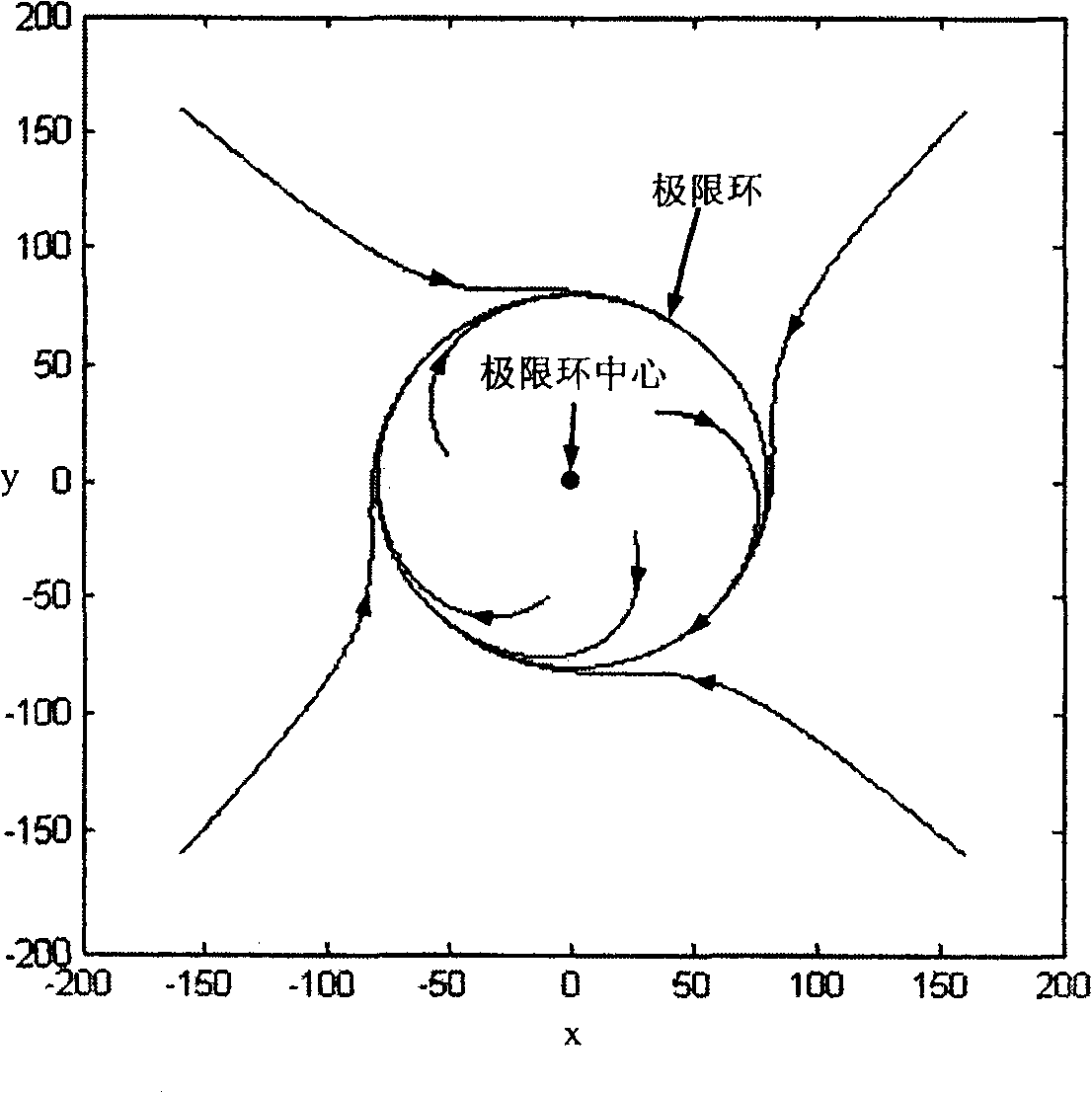
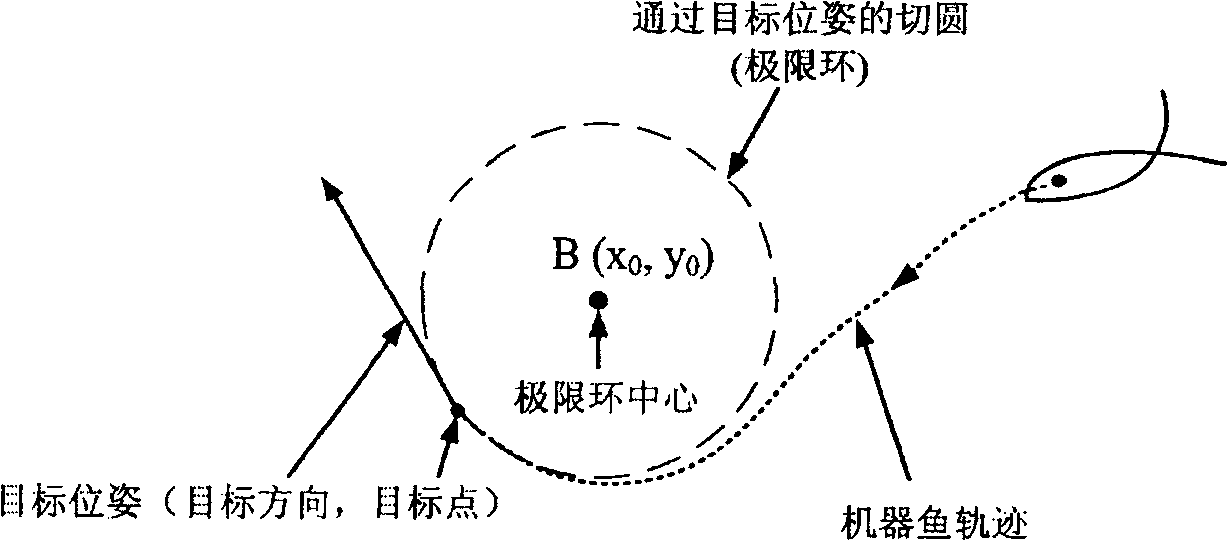
[0067] 1. Pose control based on the "limit cycle" method
[0068] In the second-order nonlinear autonomous system, there is an important class of motion expressed by isolated closed orbits, which not only plays a very important role in the theory of differential equations itself, but also in the application of engineering technology. This kind of isolated closed orbits is called It is a "limit cycle", and any point starting from any position converges to the "limit cycle", and moves periodically along it. Since the classical control method cannot guarantee that the underwater ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More