

Wheel chair type robot for walking training of paraplegia patient
A technology of robots and wheelchairs, applied in the direction of tools, manipulators, passive exercise equipment, etc. to help people move around, which can solve the problems of difficult patients, maintaining the consistency of rehabilitation training movements, and high work intensity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention is illustrated below in conjunction with accompanying drawing.
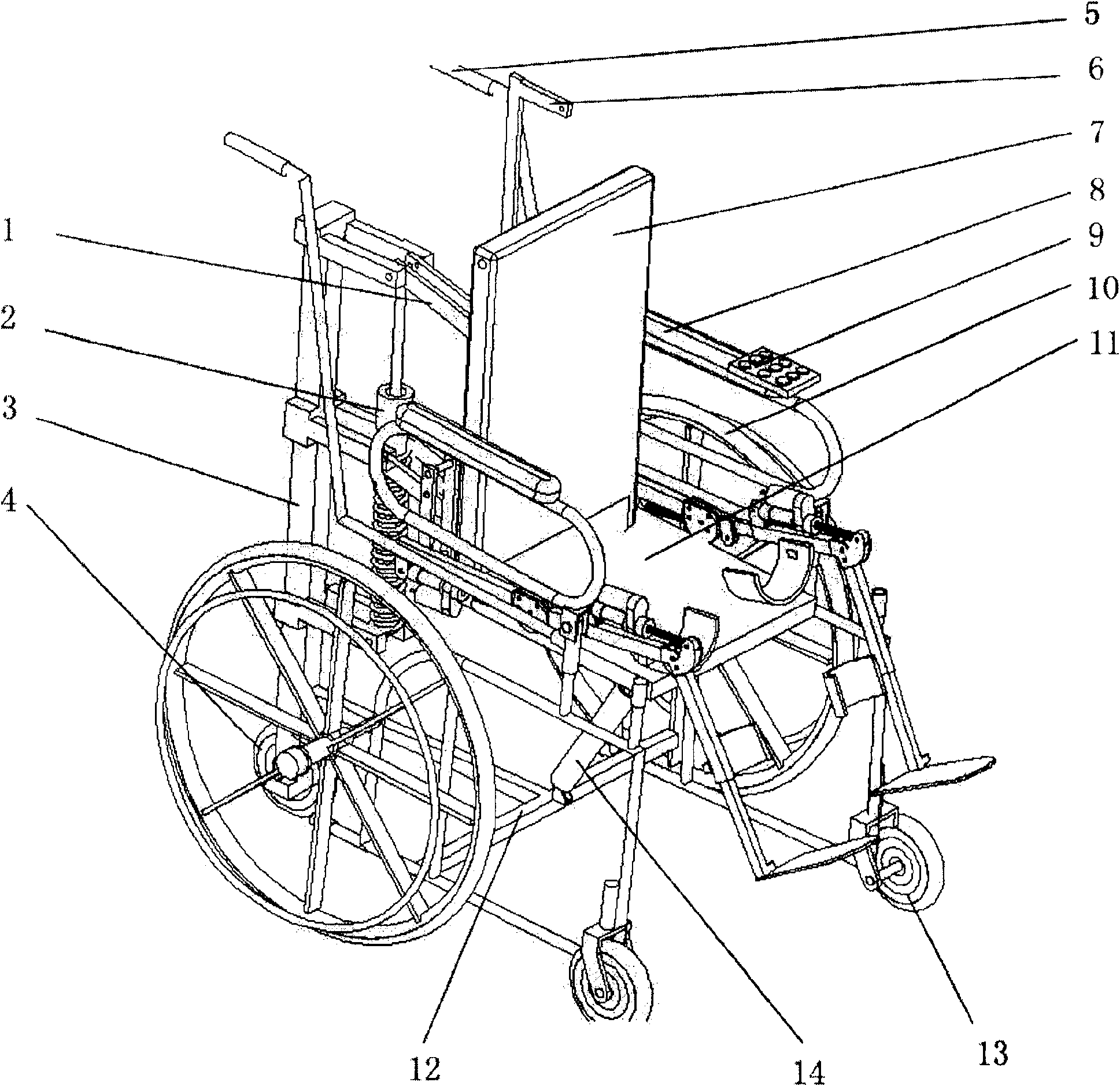
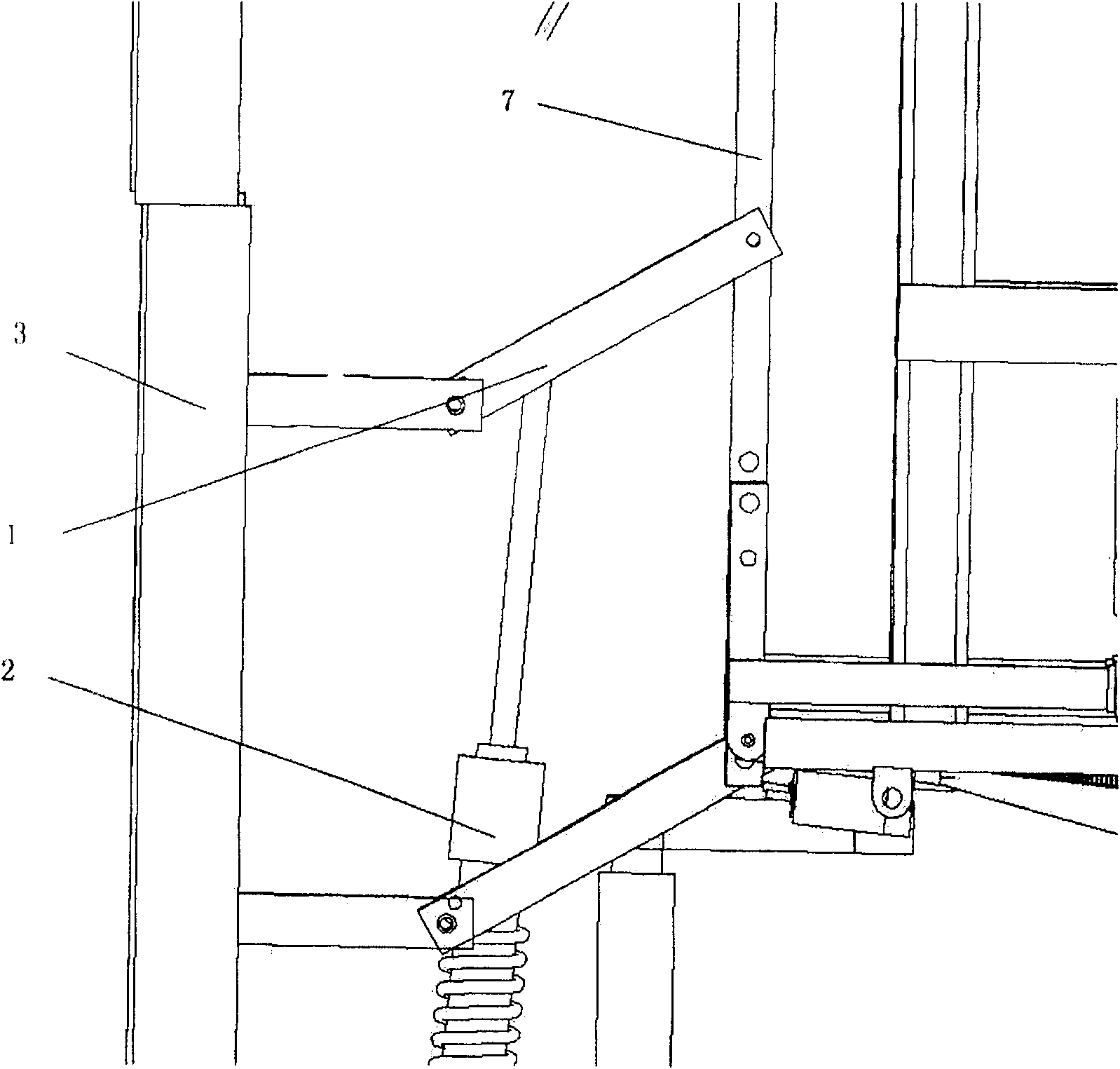
[0018] see figure 1 , figure 2 , image 3 , the wheelchair-type paraplegic walking training robot includes a wheelchair system with a large wheel 10, a small wheel 13, a push handle frame 5, a backrest 7, a cushion 11 and an armrest 8, a lower extremity exoskeleton system, a damping support system and a controller.
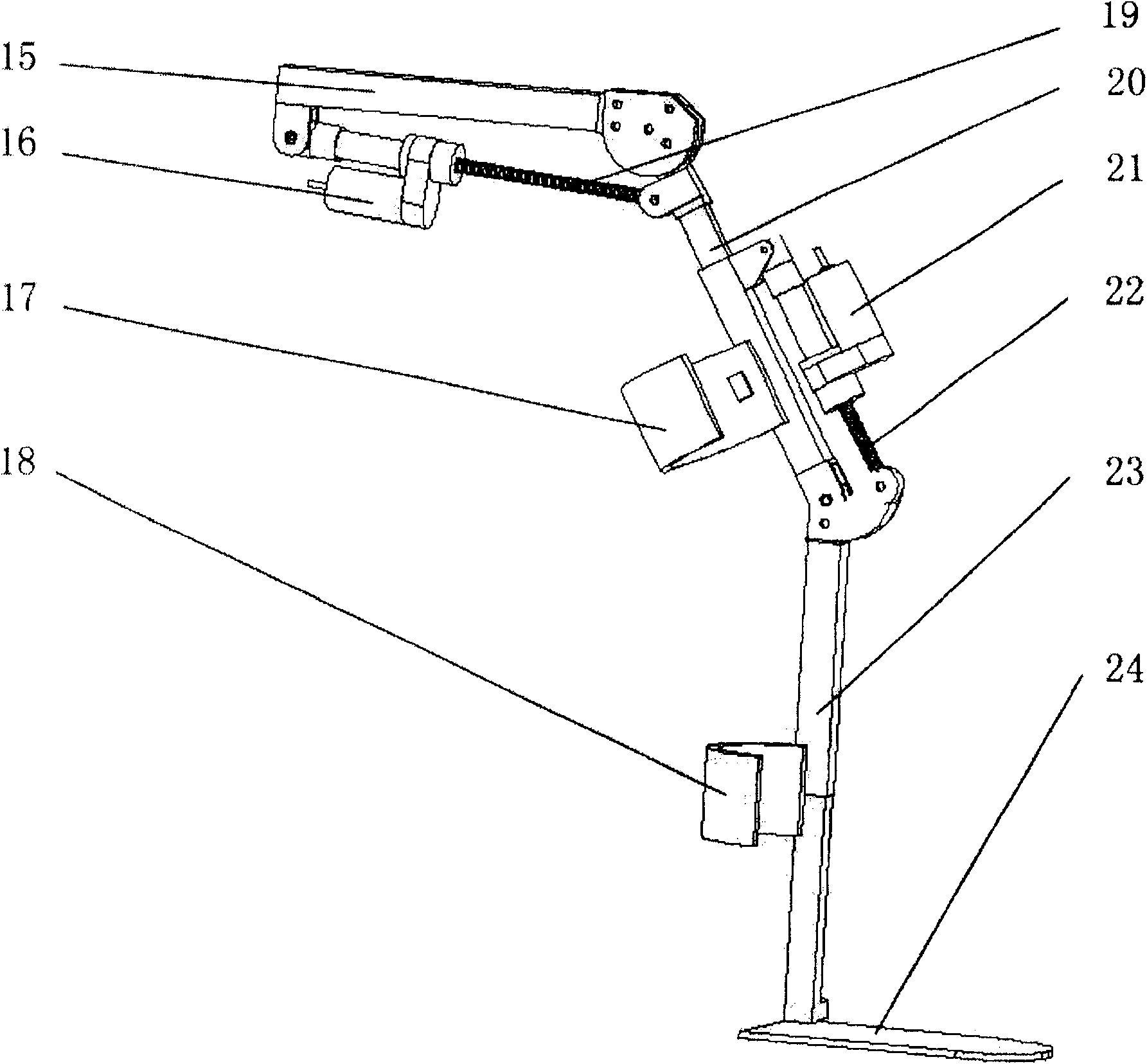
[0019] Lower extremity exoskeleton system: including hip rod 15, thigh rod 20 and calf rod 23, the end of the hip rod is fixedly connected with the backrest 7 of the wheelchair system, the other end of the hip rod 15 is hinged with the thigh rod 20 to form the hip joint, the thigh Bar 20 and calf bar 23 are hinged to form knee joint, and the end of calf bar is fixed with pedal board 24, and the two ends of the first ball screw 19 are hinged with the end of hip bar 15 and the upper end of thigh bar respectively, the first motor 16 The rotating shaft is connected with t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More