

A robot with stable balance performance and its control method
A technology of balancing performance and robotics, which is applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., and can solve the problems of limited height difference between humanoid robots and real people, complex logical relationship of data processing of self-balancing robots, and humanoid machines not capable of heavy-duty work, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
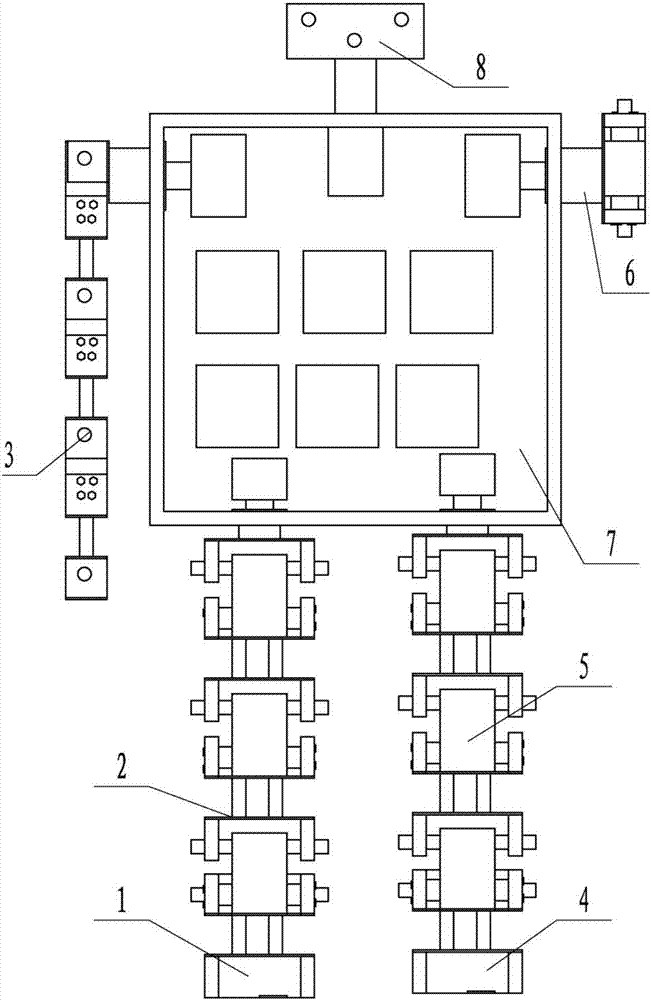
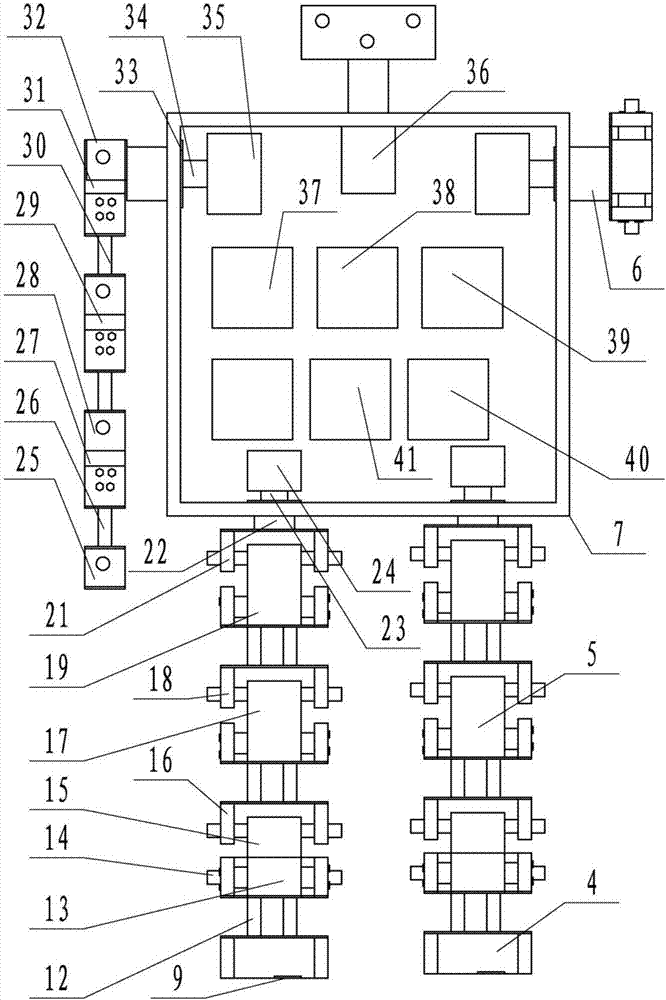
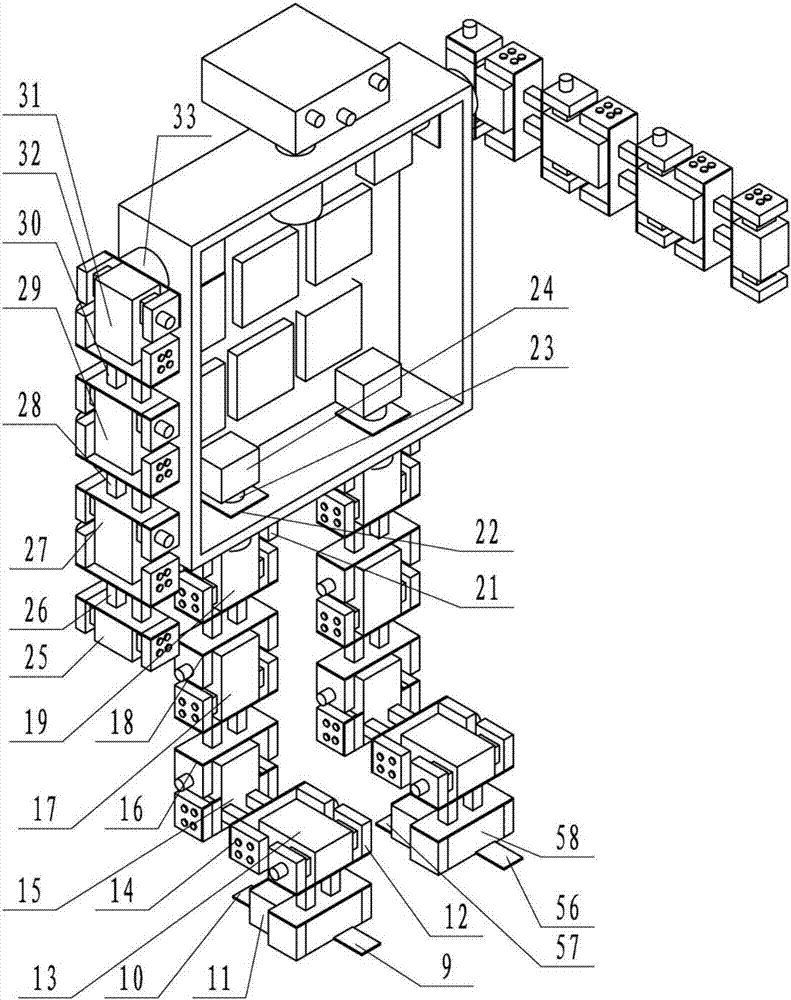
[0050] like Figure 1-10 As shown, the present invention includes a body 7 arranged above the iron plate, a left leg drive device 2 and a right leg drive device 5 hinged on both sides of the lower end of the body shell 7 respectively, and a left foot drive device 1 hinged at the lower end of the left leg drive device 2. , The right foot drive device 4 and the electrical control unit hinged on the lower end of the right leg drive device 5, the left leg drive device 2 and the right leg drive device 5 have the same structure, and the left leg drive device 2 and the right leg drive device 5 are relative to the body 7 The center line is symmetrically arranged, the right foot driving device 4 and the left foot driving device 1 have the same structure, and the right foot driving device 4 and the left foot driving device 1 are symmetrically arranged with respect to the center line of the body 7;
[0051] The left foot driving device 1 includes a left foot frame 12 arranged above the i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More