

Parallel type multi-freedom artificial limb exoskeleton ankle joint
A degree of freedom, parallel technology, applied in the field of rehabilitation engineering, can solve the problems of difficult to achieve stable control, low positioning accuracy of the mechanism, etc., and achieve the effect of facilitating real-time calculation and control, avoiding error accumulation and amplification effects, and high stiffness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
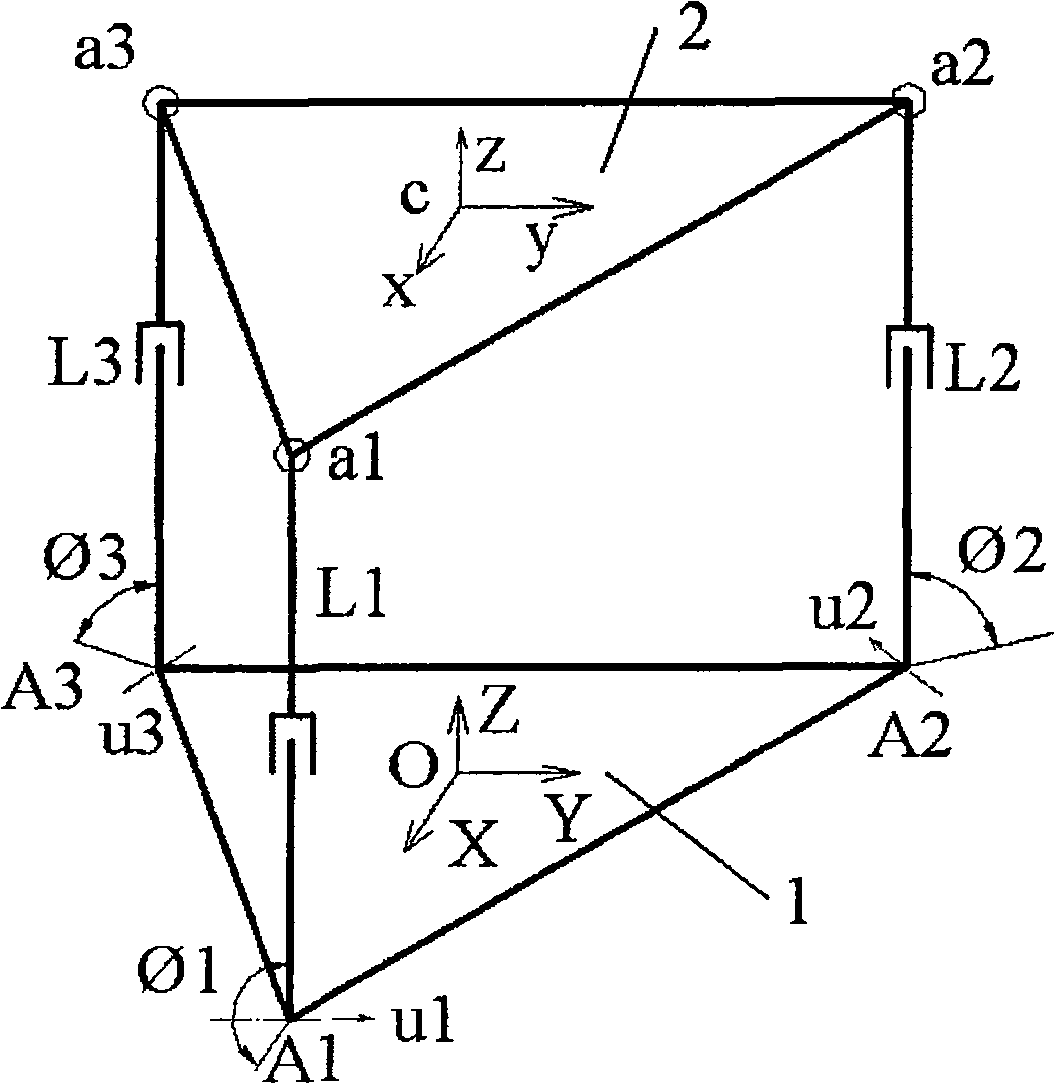
[0024] In this embodiment, the 3-RPS structure configuration is selected, and the schematic diagram of the 3-RPS structure is as follows figure 1 As shown, the three points on the static platform 1 are A 1 、A 2 、A 3 , the three points on the moving platform 2 are respectively a 1 、a 2 、a 3 , the three revolving pairs of static platform 1 are The lengths of the three driving rods are L 1 , L 2 , L 3 , the three kinematic pairs of the dynamic platform 2 and the static platform 1 form two isosceles triangles respectively. For the driving rod of a single branch c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More