

No-manned plane fixed radius convolved navigation method
A radius and aircraft technology, applied in the field of drone navigation, can solve problems such as difficult to obtain reconnaissance results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The following is a further description of the UAV fixed-radius circle piloting method of the present invention in conjunction with the accompanying drawings.
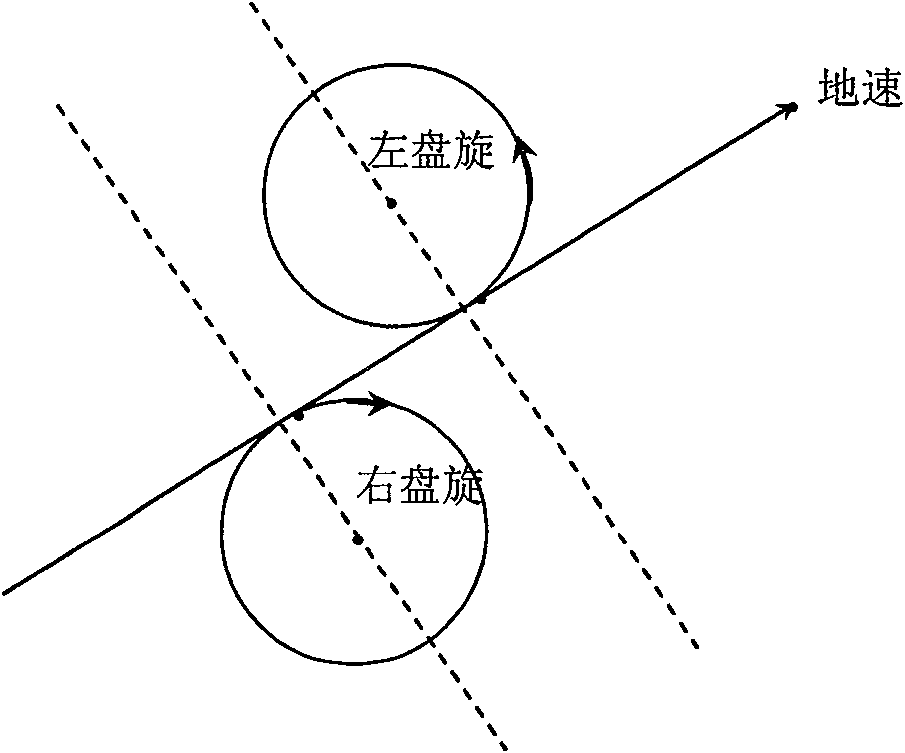
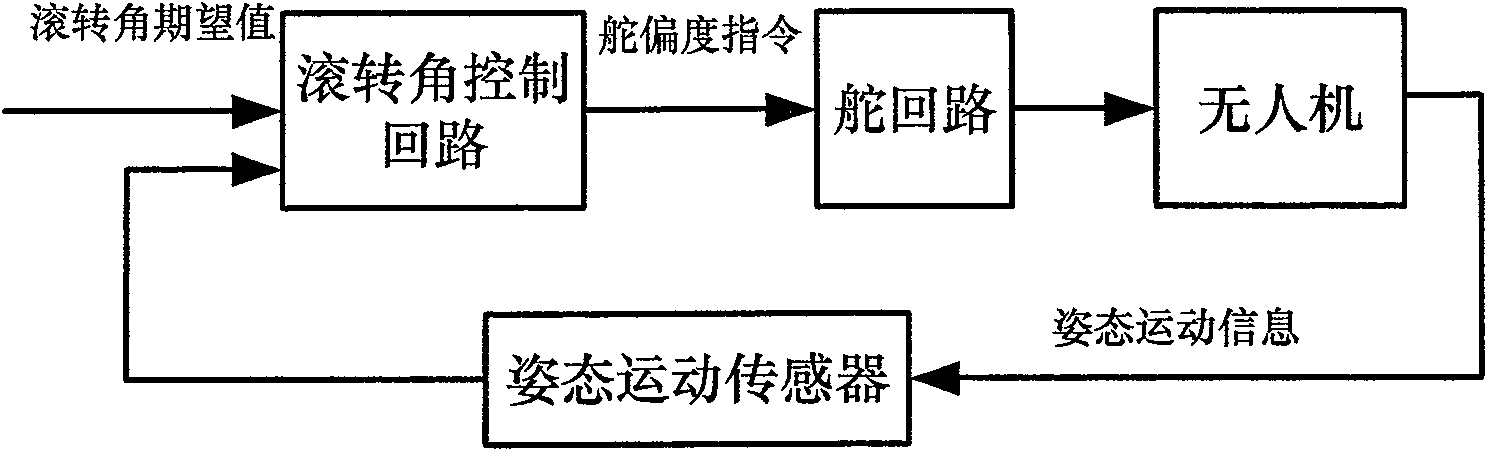
[0041] The working principle of the UAV fixed-radius hovering pilot method proposed by the present invention is as follows: Figure 4 As shown, the piloting method calculates the navigation parameters such as the lateral deviation and lateral deviation speed of the aircraft's expected trajectory continuously and in real time according to the predetermined circling radius, the desired circling mode, and the aircraft position, altitude and ground speed information obtained by the sensor. , and input the aircraft attitude motion information obtained by the attitude motion sensor to the lateral control loop to obtain the rudder deflection command, and finally guide the aircraft to fly along the desired route.
[0042] The hovering navigation method with fixed radius of the UAV of the present invention comprises the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More