

Self control type multi- degree of freedom buttjunction platform
A technology of docking platform and degrees of freedom, applied in the direction of adaptive control, workbench, general control system, etc., can solve the problem that it is difficult to accurately define whether the docking body and the docking cavity are accurately aligned, and the docking platform has no adaptive function and influence. The quality of the butt joint and the butt joint cavity and the docking effect, etc., can prevent excessive torque and protect from damage.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
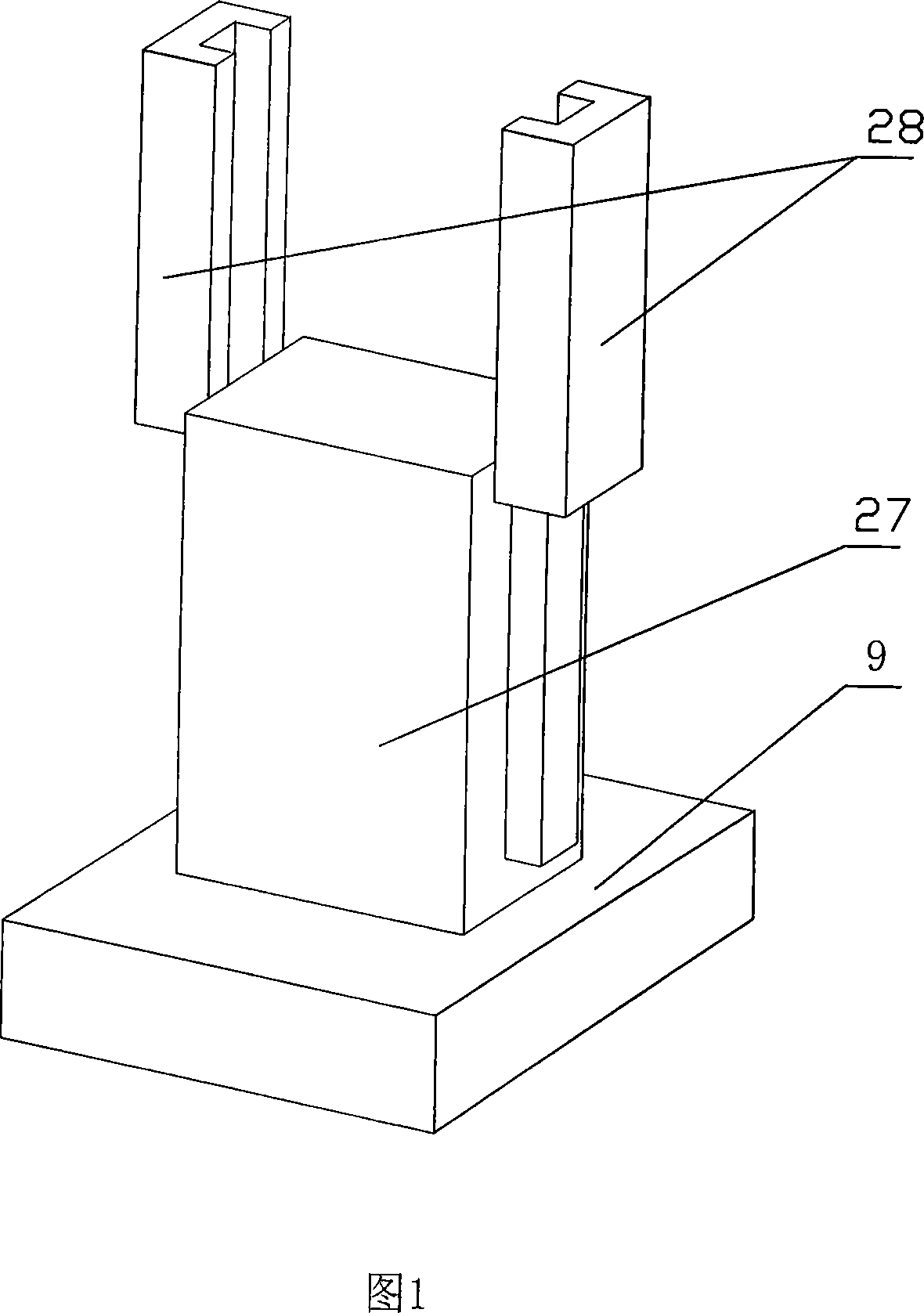
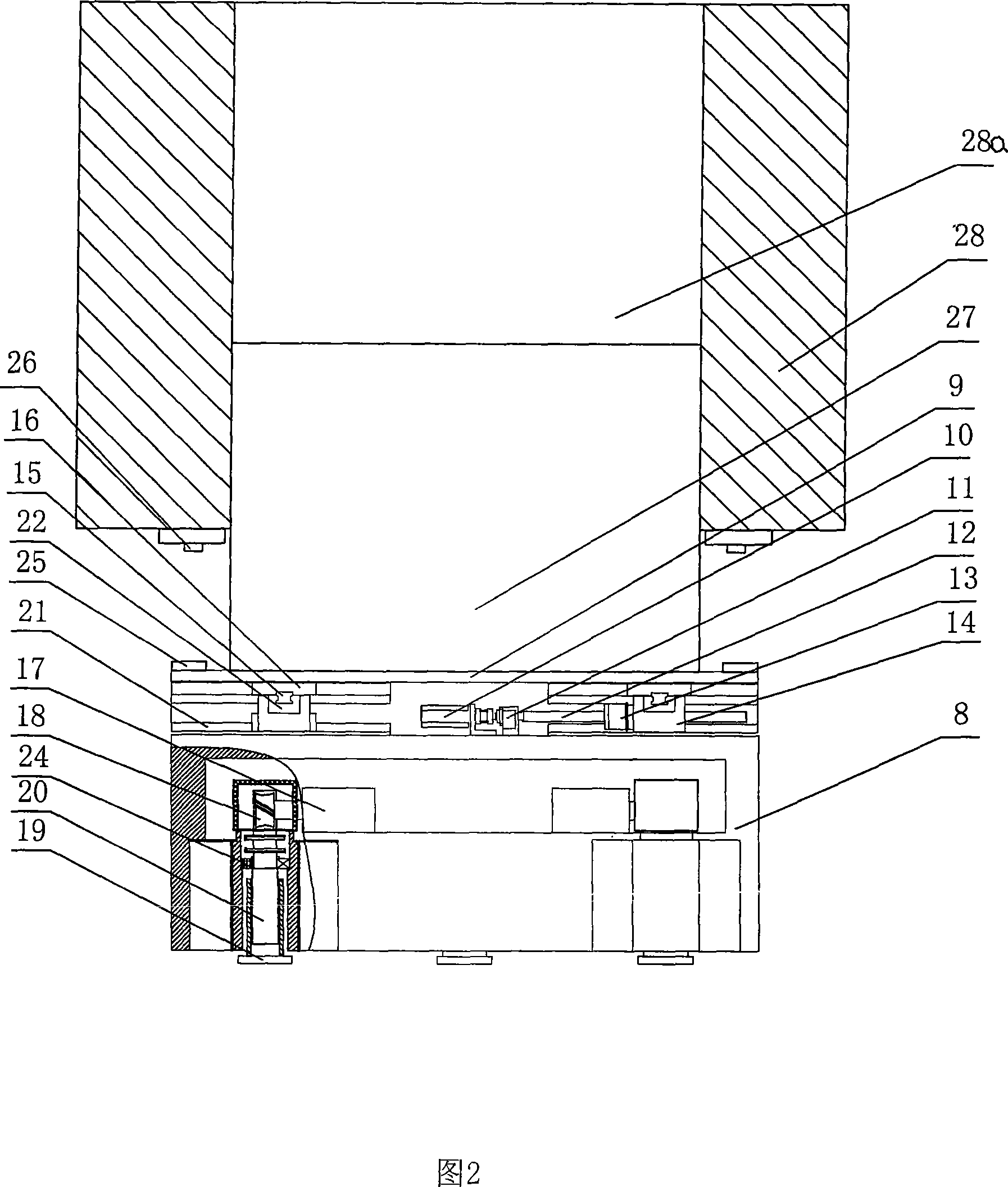
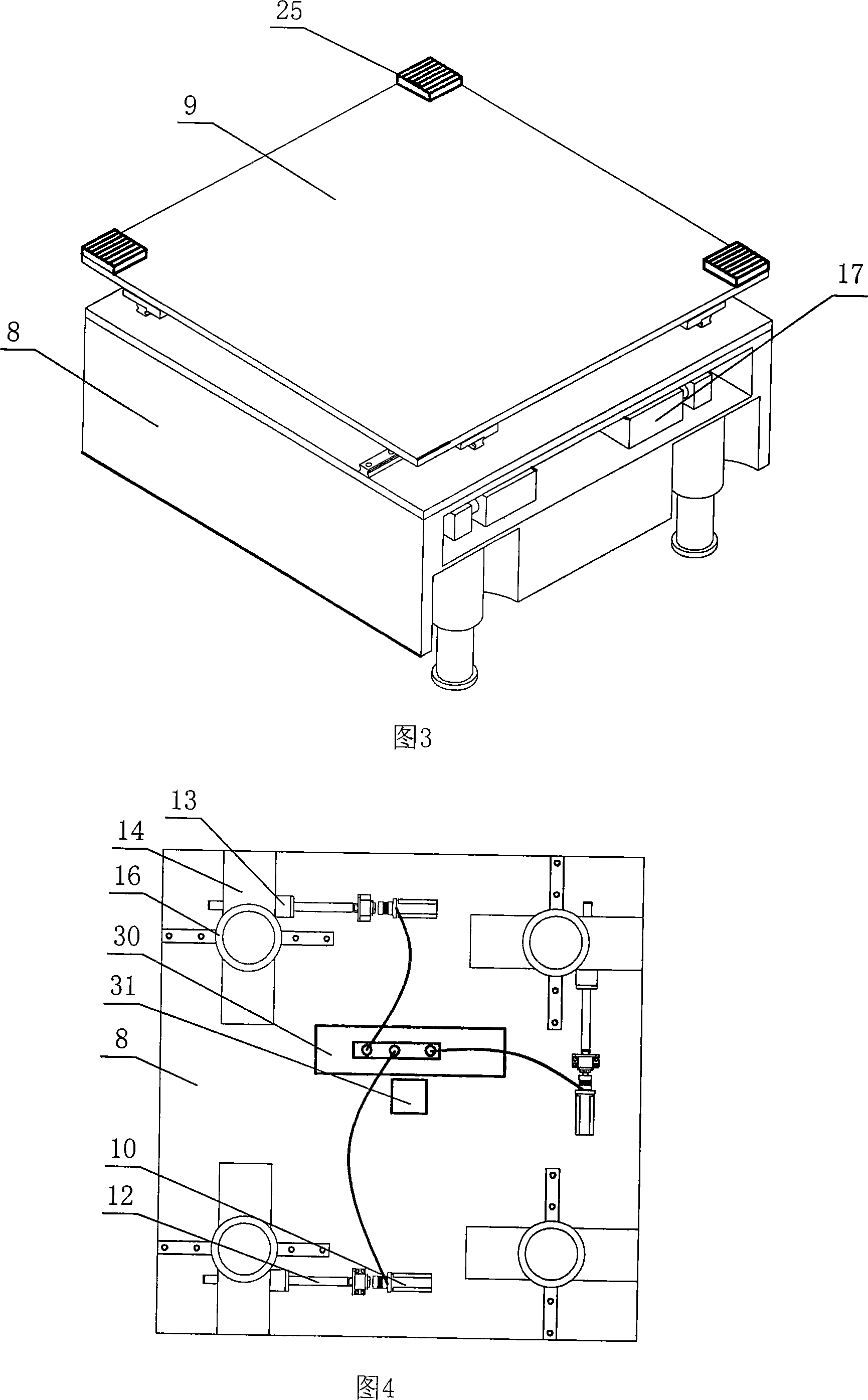
[0058] As shown in Figures 2, 3, and 4: a self-controlled multi-degree-of-freedom docking platform, including a mechanical self-adjusting docking platform, the key is that an adaptive control system is installed on the mechanical self-adjusting docking platform, and the mechanical The self-adjusting docking platform is composed of a support platform 8, a working platform 9, three plane adjustment mechanisms with the same structure, a follower mechanism, and three vertical adjustment mechanisms with the same structure; Three plane adjustment mechanisms and a follower mechanism are distributed in a square, and three vertical adjustment mechanisms with the same structure are installed on the support platform 8 below the plane adjustment mechanism, and they are distributed in a triangle;
[0059] Described plane adjusting mechanism is mad...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More