

Haptic guidance system and method
A tactile, computer system technology, applied in the field of surgical systems, which can solve the problems of inability of surgeons to improve surgical skills, lack of real-time adaptability, and limited flexibility and dexterity of robotic systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
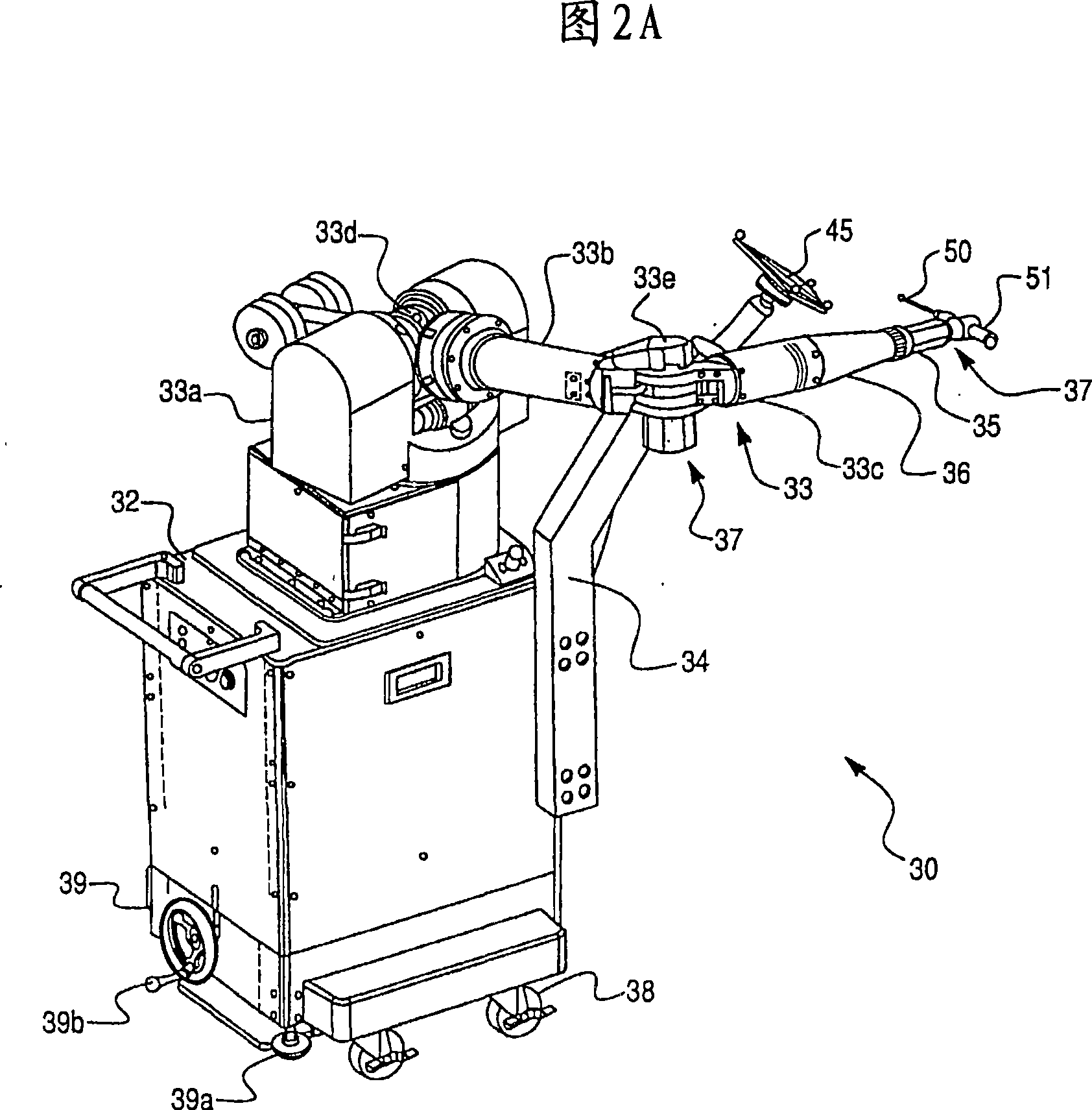
[0192] According to one embodiment, the force feedback (or output torque) required by the haptic device 30 is determined based on the proximity of a certain part of the haptic device 30 (such as the tool 50) to a virtual (or tactile) boundary, wherein the boundary Associated with the representation of the anatomy. Thus, if the tool 50 is placed at a sufficient distance from the tactile boundary, the controller does not generate any tactile force and the user is free to move the tool 50 as if probing in an empty space. However, as the tool 50 approaches or touches the tactile boundary, the controller sends a torque command to the motor, thereby applying an appropriate torque to the user's hand through the interface 37 . Preferably, the magnitude of the force feedback is increased as the tool 50 approaches the virtual boundary without discontinuous phases that would cause oscillations or undesirable vibrations. For example, as tool 50 approaches the haptic boundary, haptic devi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More