

Robot grid sub-map amalgamation method based on immune self-adapted genetic algorithm
A genetic algorithm and map fusion technology, applied in the field of robot grid submap fusion based on immune adaptive genetic algorithm, which can solve the problems of reduced population diversity, ignoring location estimation, and falling into local optimum.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] 1 Basic concepts
[0061] The environmental grid map is represented by an n×m matrix m, and the (i, j), (1≤i≤n, 1≤j≤m) elements of the matrix represent the occupancy or idle state of the grid (i, j), A positive value indicates that the grid is free, a negative value indicates that the grid is occupied, and the absolute value of the value indicates the degree of confidence. 0 indicates that the state information of the corresponding grid is unknown.
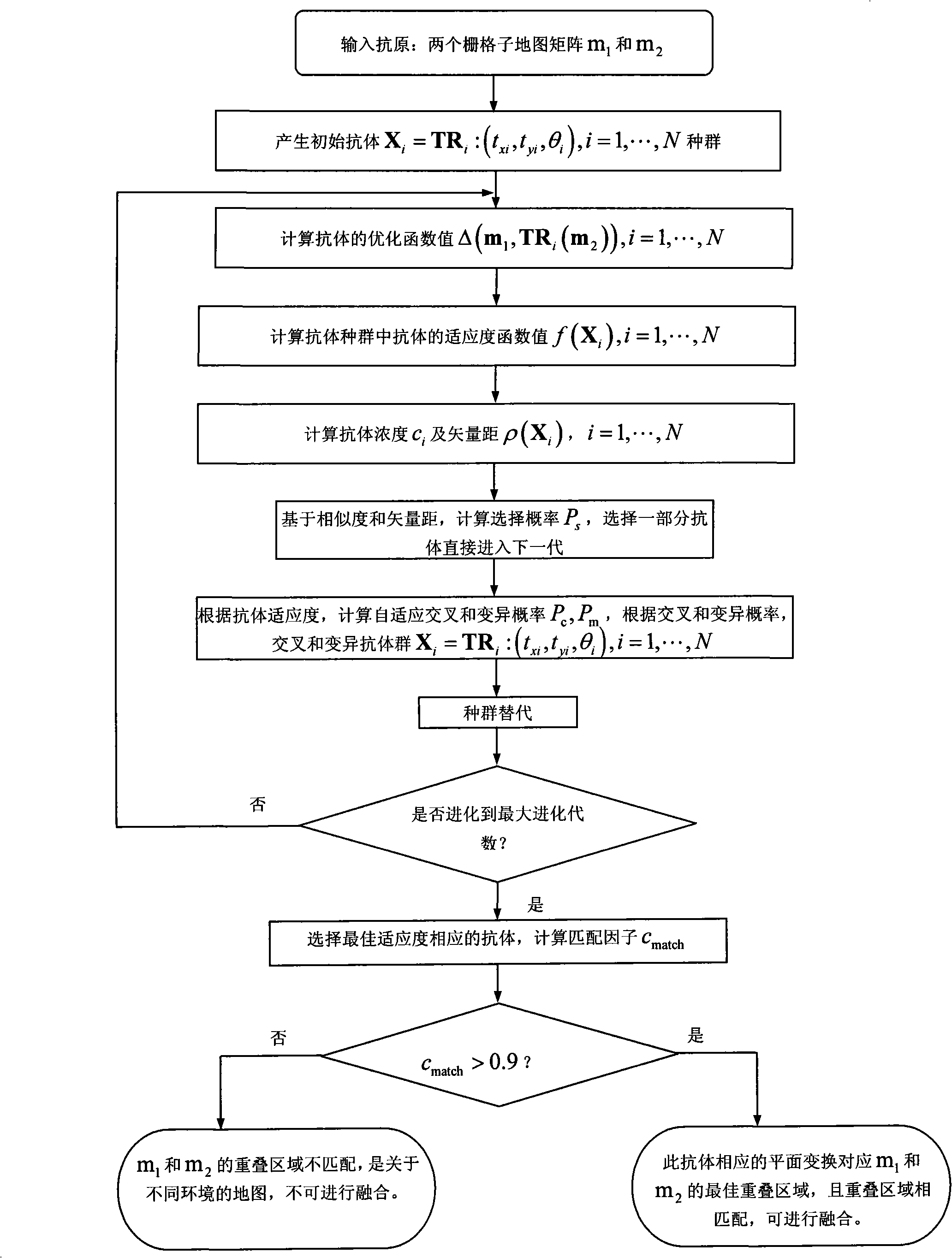
[0062] Since the relative position information of the two robots is not known, it is impossible to directly fuse the two grid submaps. One grid submap is fixed, and the other grid submap tries various plane transformations such as translation and rotation to find the two grids. The best overlapping area of the submap, according to the situation of the best overlapping area to fuse two raster submaps. Assuming that the grid map is two-dimensional, a certain point (x, y) in the grid map is represented by the vector [x y 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More