

Operation needle gripping quick-changing device for micro-wound operation robot
A technique of minimally invasive surgery and surgical needles, applied in the direction of micro manipulators, applications, manipulators, etc., to achieve the effect of solving terminal disinfection and needle holding problems, facilitating surgical operations, and facilitating disinfection treatment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The surgical needle clamping quick-change device for a minimally invasive surgery robot according to the present invention will be described below with reference to the embodiments, but it is not intended to limit the present invention.
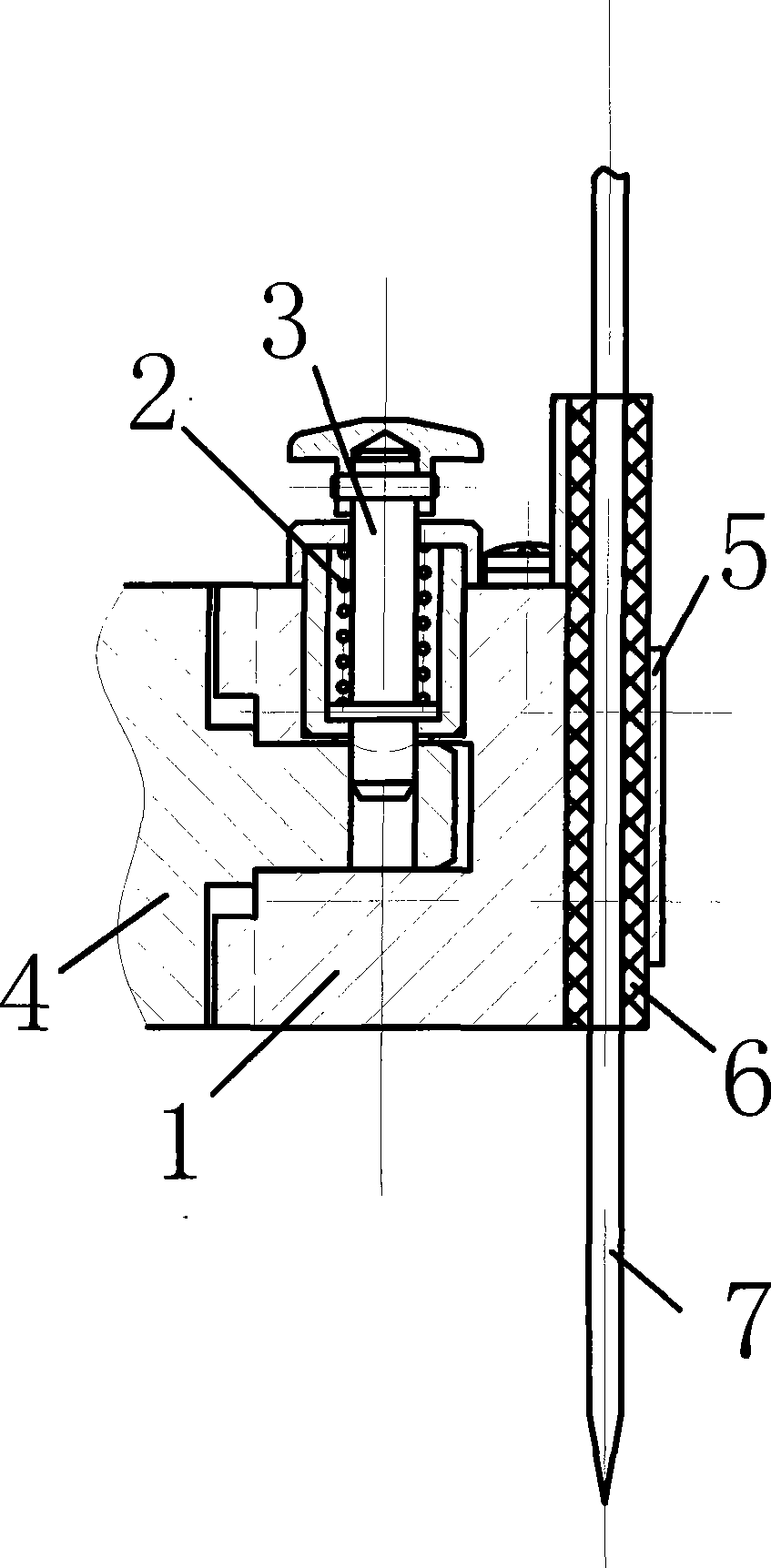
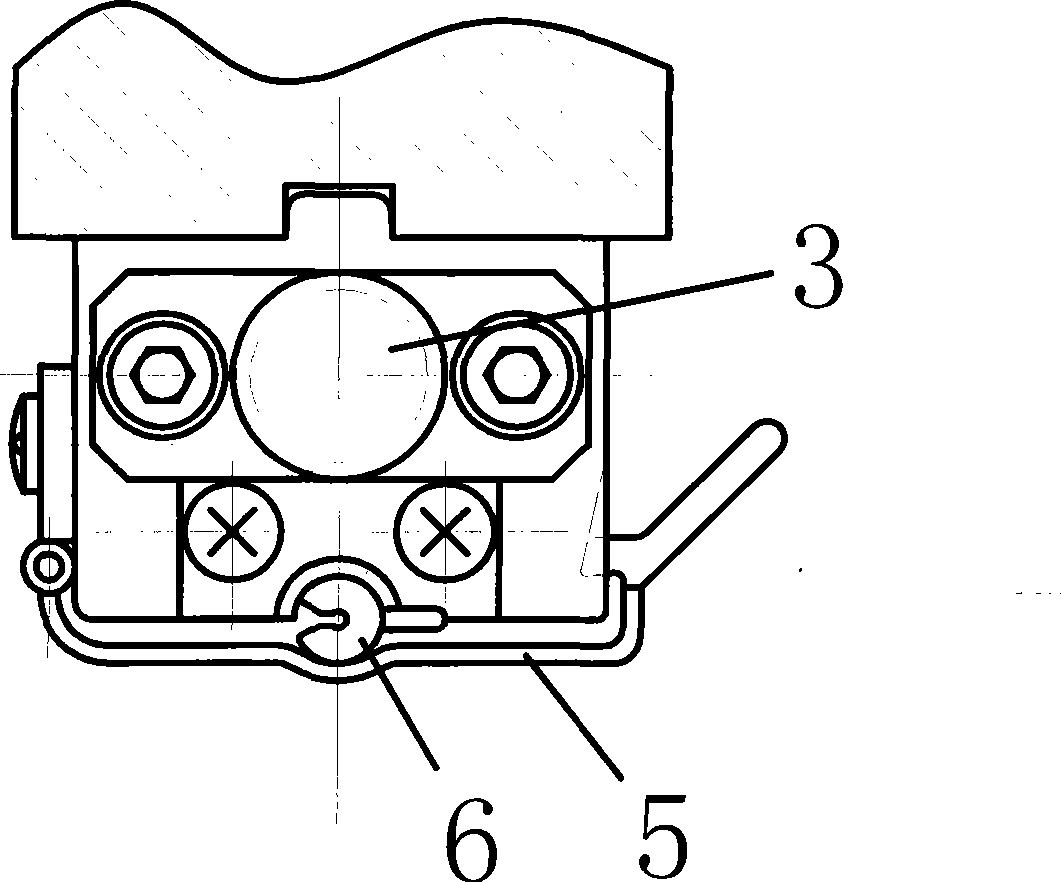
[0013] Such as figure 1 , figure 2 , image 3 As shown, the surgical needle clamping quick-change device according to the embodiment of the present invention is composed of a quick-change head 1 , a compression spring 2 , a movable shaft 3 , a movable pressure plate 5 and a surgical needle sleeve 6 . The quick-change head 1 is sleeved on the frame 4, and the top of the quick-change head 1 is provided with a through hole for installing a compression spring 2 and a movable shaft 3, and the movable shaft 3 passes through the through hole on the quick-change head. hole, the compression spring 2 is installed between the movable shaft 3 and the quick-change head 1, there is a step in the middle of the movable shaft 3, one end is positione...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More