

Archimedes spiral wheel for stair climbing vehicle and double-rocking lever mechanism
An Archimedes spiral, double rocker mechanism technology, applied in the field of mechanical design, can solve the problems of unstable movement, discontinuous movement, poor bearing capacity, etc., to achieve the effect of smooth and continuous movement, convenient for moving up and down stairs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0021] Embodiment 1, combining figure 2 , image 3 , Figure 4 , Figure 5 , the present invention uses the Archimedes spiral wheel and the double rocker mechanism for the stair climbing vehicle, which is composed of the Archimedes spiral three-blade wheel (8) and the double rocker mechanism (7); the Archimedes screw Line three impellers (8) are connected with double rocker mechanism (7).
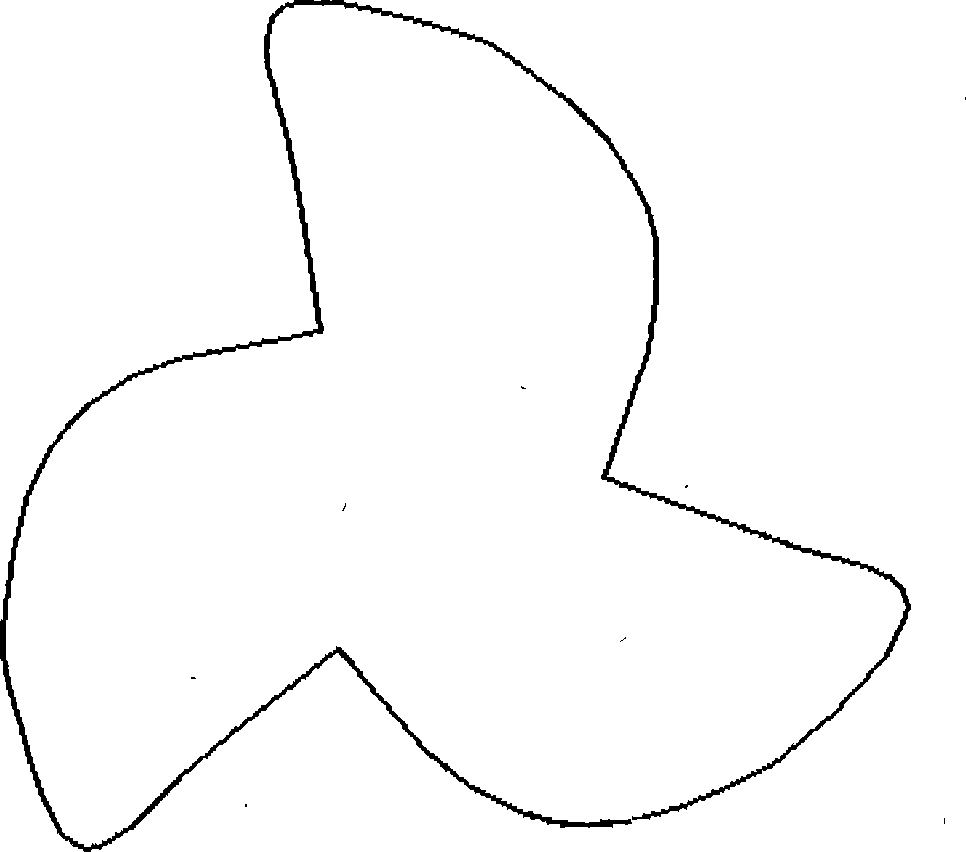
[0022] The outer contour shape of the Archimedes spiral three impellers (8) is an Archimedes spiral.
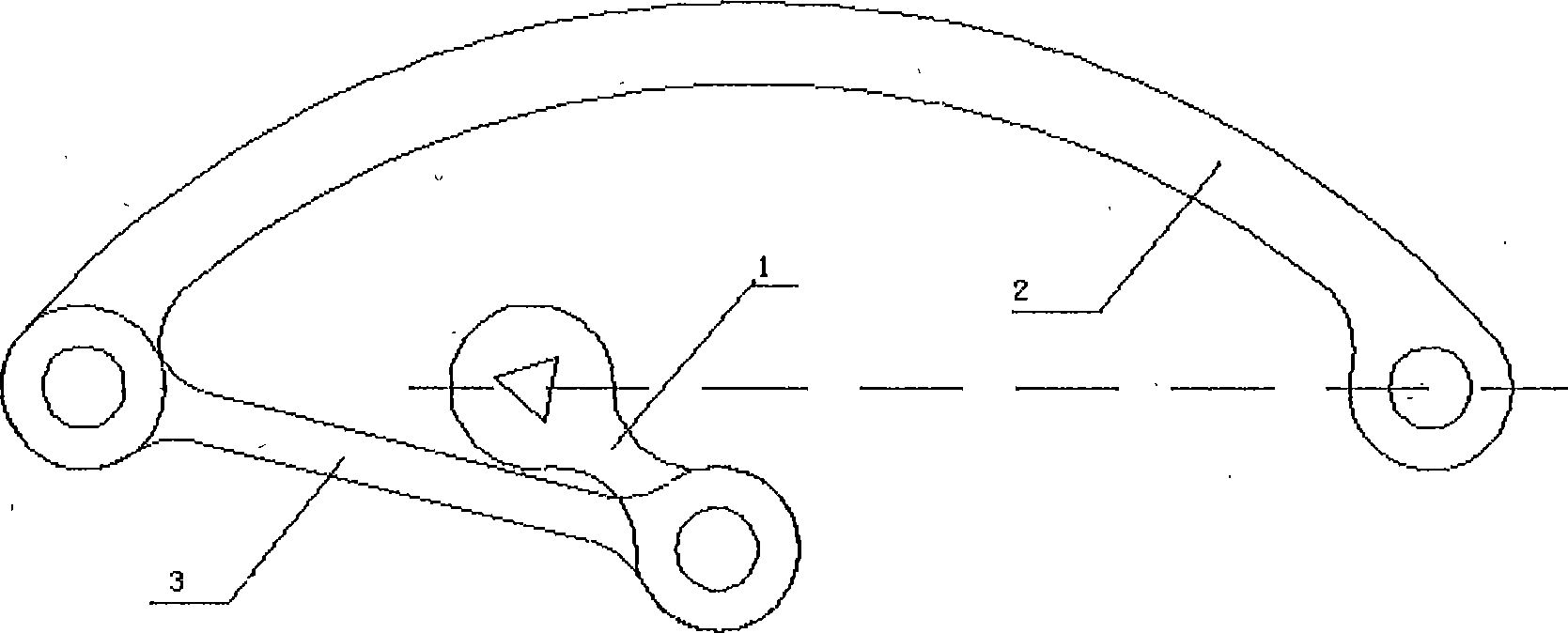
[0023] The double-rocker mechanism (7) includes a first double-rocker unit (4), a second double-rocker unit (5) and a third double-rocker unit (6); the first double-rocker unit (4) Connect the second double rocker unit (5), and the second double rocker unit (5) connect to the third double rocker unit (6).
[0024] The first double rocker unit (4) includes a short connecting rod (1), a long arc connecting rod (2) and a connecting rod (3); the short connecting rod (1) is connected to t...
Embodiment 2
[0026] Example 2, combined with Figure 1-Figure 5 , the stair-cleaning robot that is made of Archimedes spiral wheel and double rocker mechanism for stair-climbing vehicle of the present invention, the design method is as follows:
[0027] (1) Climbing plan
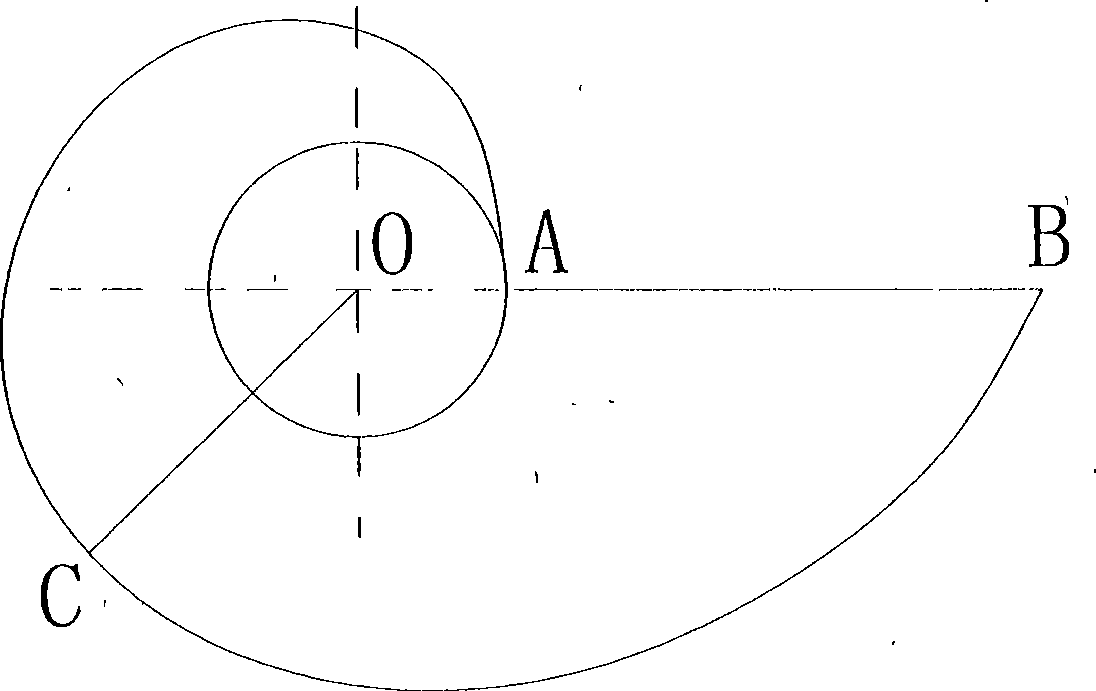
[0028] Such as figure 1 As shown, the length of the line segment AB is equal to the height of the stairs, and the length of the curve ACB is equal to the width of the staircase surface. Starting from point A, along the direction of the curve ACB, it touches the staircase surface. Due to the length relationship, when point B touches the staircase, Just as the end point of the stair surface of this step touches, point A begins to contact with the starting point of the next step of the stair surface at the same time, and the process of climbing stairs is completed in such a cycle. This is the basic principle of climbing stairs. After the basic principle is determined, the remaining problem is the line type selection of t...
Embodiment 3
[0057] Example 3, combined with Figure 7 , the present invention is equipped with two sets of transmission mechanisms when the Archimedes spiral wheel and the double rocker mechanism for the stair climbing vehicle are applied to the stair cleaning robot, such as Figure 7 As shown, the main motor drives the central shaft through gear meshing, and then the four sprockets (10) on the central shaft respectively drive the four Archimedes spiral three-impellers (8) to move, which is the main force; the double rocker The mechanism is divided into front and rear axles driven by two motors (15) respectively. The drive mode of the axles is also gear meshing (16). The triangular hole is used to drive the double rocker mechanism. The triangular shaft sections at both ends of each shaft are connected to three short connecting rods, which are evenly distributed according to the circumference, and then drive three sets of double rocker mechanisms; the Archimedes spiral three-impeller is co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More