

Archimedes spiral wheel for stair climbing vehicle and double-rocking lever mechanism
A technology of Archimedes spiral and double rocker mechanism, which is applied in the field of mechanical design, can solve the problems of unstable movement, discontinuous movement, poor bearing capacity, etc., and achieve the effect of smooth and continuous movement and convenient transportation up and down stairs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
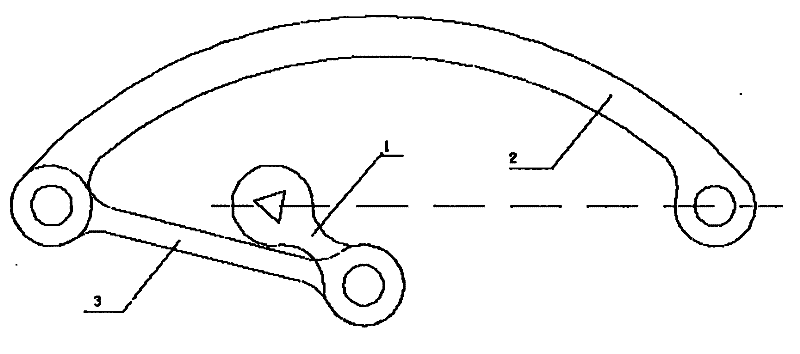
[0021] Embodiment 1, combining figure 2 , image 3 , Figure 4 , Figure 5 ,本发明爬楼梯车用阿基米德螺线轮及双摇杆机构,它是由阿基米德螺线三叶轮(8)和双摇杆机构(7)组成的;阿基米德螺线三叶轮(8)连接双摇杆机构(7)。
[0022] 所述的阿基米德螺线三叶轮(8)的外轮廓形状为阿基米德螺线。
[0023] 所述的双摇杆机构(7)包括第一双摇杆单元(4)、第二双摇杆单元(5)和第三双摇杆单元(6);第一双摇杆单元(4)连接第二双摇杆单元(5),第二双摇杆单元(5)连接第三双摇杆单元(6)。
[0024] 所述的第一双摇杆单元(4)包括短连杆(1)、长圆弧连杆(2)和连杆(3);短连杆(1)连接连杆(3),连杆(3)连接长圆弧连杆(2)。
[0025] 所述的第二双摇杆单元(5)、第三双摇杆单元(6)的结构、连接方式与第一双摇杆单元(4)相同。
Embodiment 2
[0026] Example 2, combined with Figure 1-Figure 5 ,由本发明爬楼梯车用阿基米德螺线轮及双摇杆机构构成的楼梯清扫机器人,设计方法如下:
[0027] (1)爬楼方案
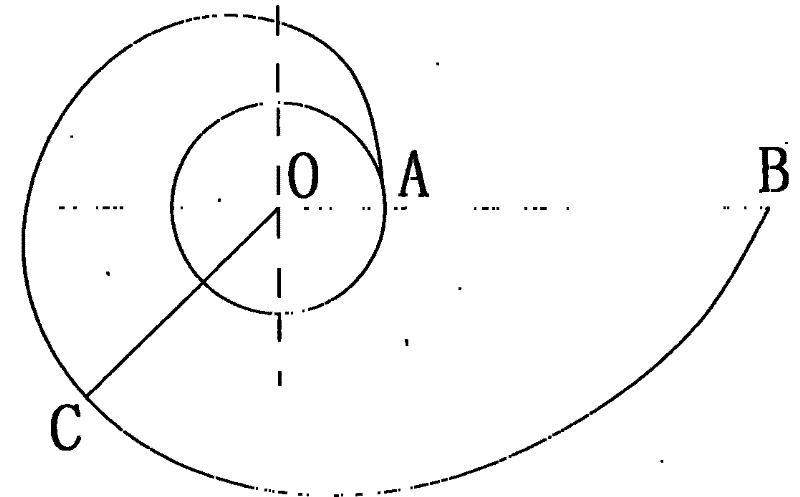
[0028] Such as figure 1 所示,线段AB的长度等于楼梯高度,而曲线ACB的长度等于楼梯面的宽度,自A点开始,沿着曲线ACB方向,与楼梯面接触,由于长度关系,当B点与楼梯接触时,正好该阶楼梯面的终了点接触,同时A点开始与下一阶楼梯面的开始点接触,如此循环,完成爬楼过程。此即基本爬楼原理。基本原理确定以后,剩下的问题是ACB段曲线的线型选择。在这个问题上,有过两种方案:渐开线和阿基米德螺线。由于一开始受渐开线型齿轮啮合原理启发,才想到这种爬楼原理,因此计划用渐开线做为轮子的外轮廓。但在后来研究中发现阿基米德螺线有一个特点是半径的增加与角度的增加成正比关系,用在爬楼过程中,体现为:当轮子匀速转动时,轮子轴线位置匀速上升,即轮子运动时在竖直方向上实现匀速运动,这无疑增加了爬楼机运动的平稳性,因此改用阿基米德螺线作为爬楼机轮子的外轮廓。
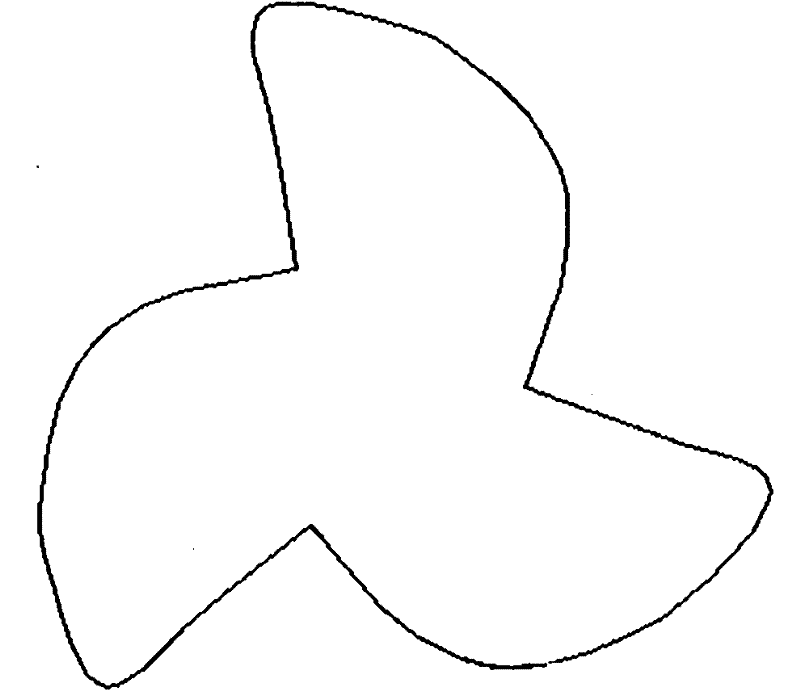
[0029] 按照这个方案,轮子每转动一周,爬楼机爬过一阶楼梯,同理,也可以改为n阶楼梯,即将圆周分为n段,每段对应的拥有直线段AB和曲线段ACB,第i段分别记作A i B i , A i C i B i . 此时当第i段的B点即B i 点与楼梯接触时,第i+1段的A点,即A i+1 点与下一阶楼梯开始点接触,继续爬楼过程。以此为基础,综合考虑,进一步改进该方案,确定方案为n=3,即每转动一周爬过三阶楼梯(如 figure 2 ).
[0030] (2)设计计算
[0031] 阿基米德螺线轮型的尺寸设计
[0032] 基圆半径ρ 0 确定方法(以n=1为例):曲线AB上任一点C(如 figure 1 ),计OC的长度为ρ,OC与OA夹角为θ,则可设
[0033] ρ=c×θ+ρ 0
[0034] c为一与n有关的常数,由B处半径ρ的值计算得出:
[0035] c=(ρ-ρ 0 ) / 2π=h / 2π
[0036] so
[0037] ρ=h×θ / 2π+ρ 0
[0038] 再对曲线AB积分得:
...
Embodiment 3
[0057] Example 3, combined with Figure 7 , the present invention is equipped with two sets of transmission mechanisms when the Archimedes spiral wheel and the double rocker mechanism for the stair climbing vehicle are applied to the stair cleaning robot, such as Figure 7 As shown, the main motor drives the central shaft through gear meshing, and then the four sprockets (10) on the central shaft respectively drive the four Archimedes spiral three-impellers (8) to move, which is the main force; the double rocker The mechanism is divided into front and rear axles driven by two motors (15) respectively. The drive mode of the axles is also gear meshing (16). The triangular hole is used to drive the double rocker mechanism. The triangular shaft sections at both ends of each shaft are connected to three short connecting rods, which are evenly distributed according to the circumference, and then drive three sets of double rocker mechanisms; the Archimedes spiral three-impeller is co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More