

Eight-claw executing mechanism applied to weed-eradicating robot
An actuator and robot technology, applied in the field of agricultural robots, can solve the problems of cam meshing interference and only one weeding shovel tooth can be controlled, and achieve the effects of continuous weeding action, easy control and manipulation, and simple and flexible operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
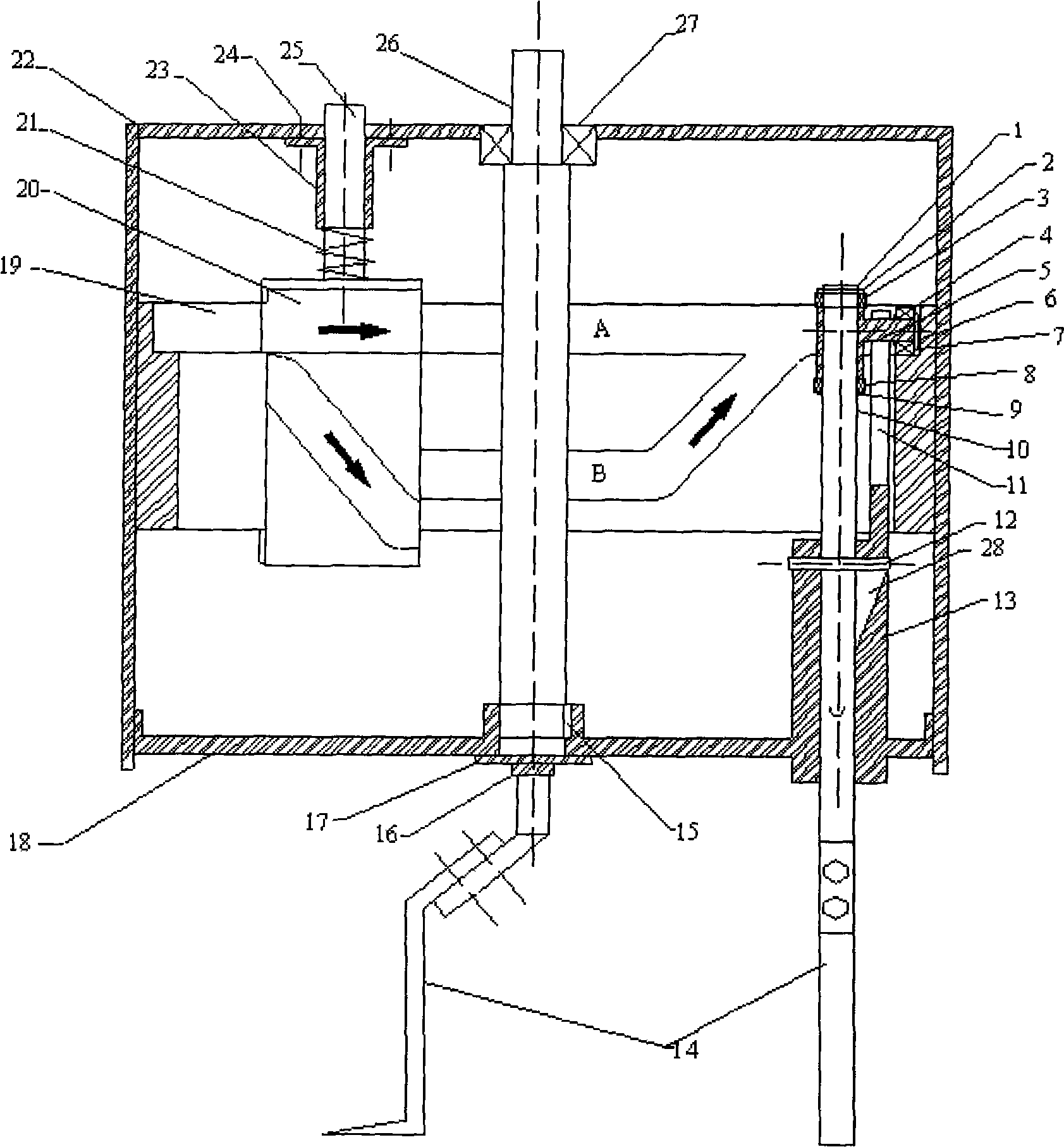
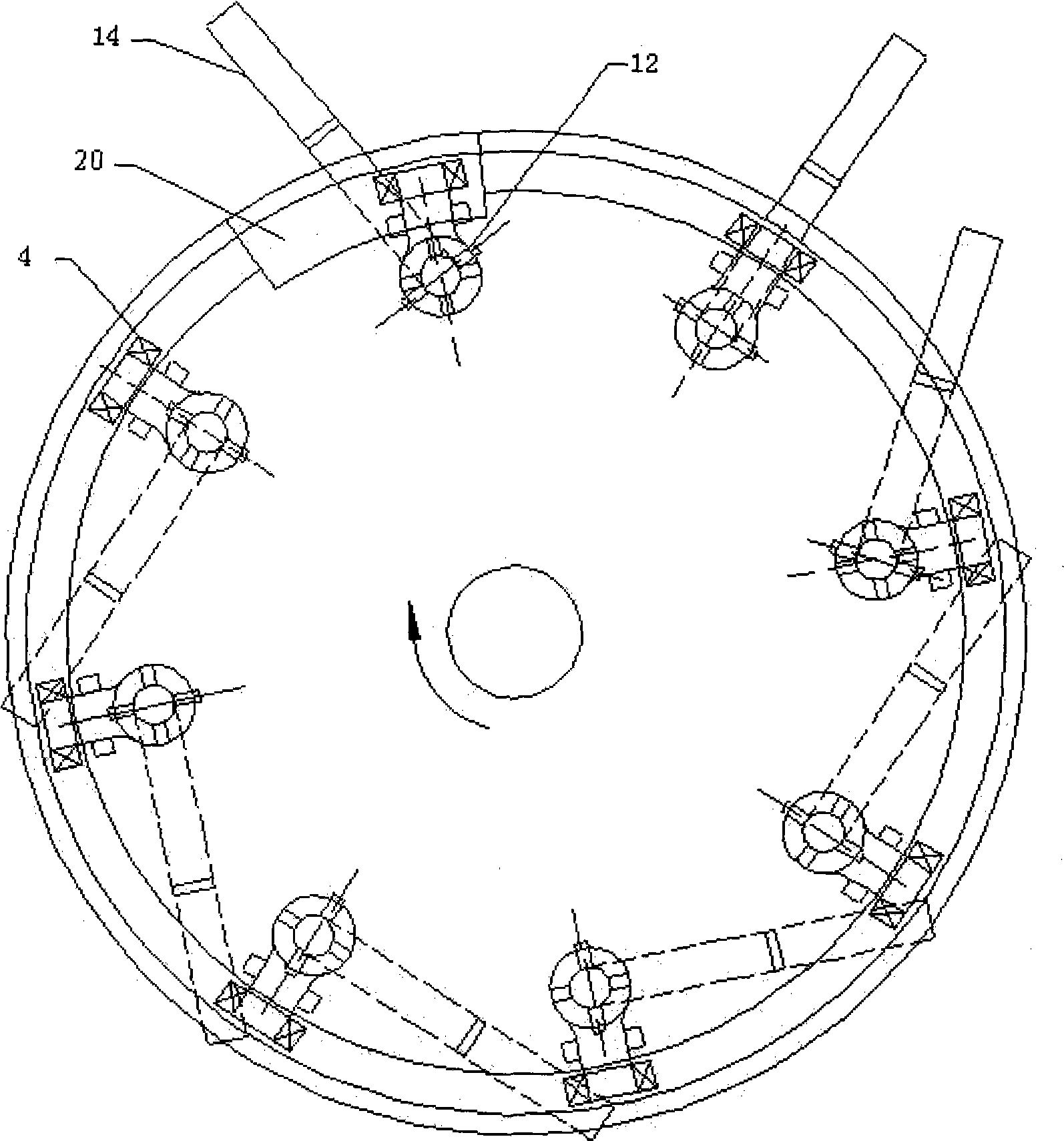
[0011] The spindle turntable system includes a spindle 26, a turntable 18, a key 15, a shaft end retaining ring 17, a bolt 16, a sleeve 13 with a spiral guide rail 28, and a limit stop 11. The main shaft 26 is supported by a rolling bearing 27, and the turntable 18 passes through the key 15. It is connected to the main shaft and is positioned axially through the shaft end retaining ring 17 and the bolt 16. Eight sleeves 13 with helical guide rails are fixed on the turntable 18 .
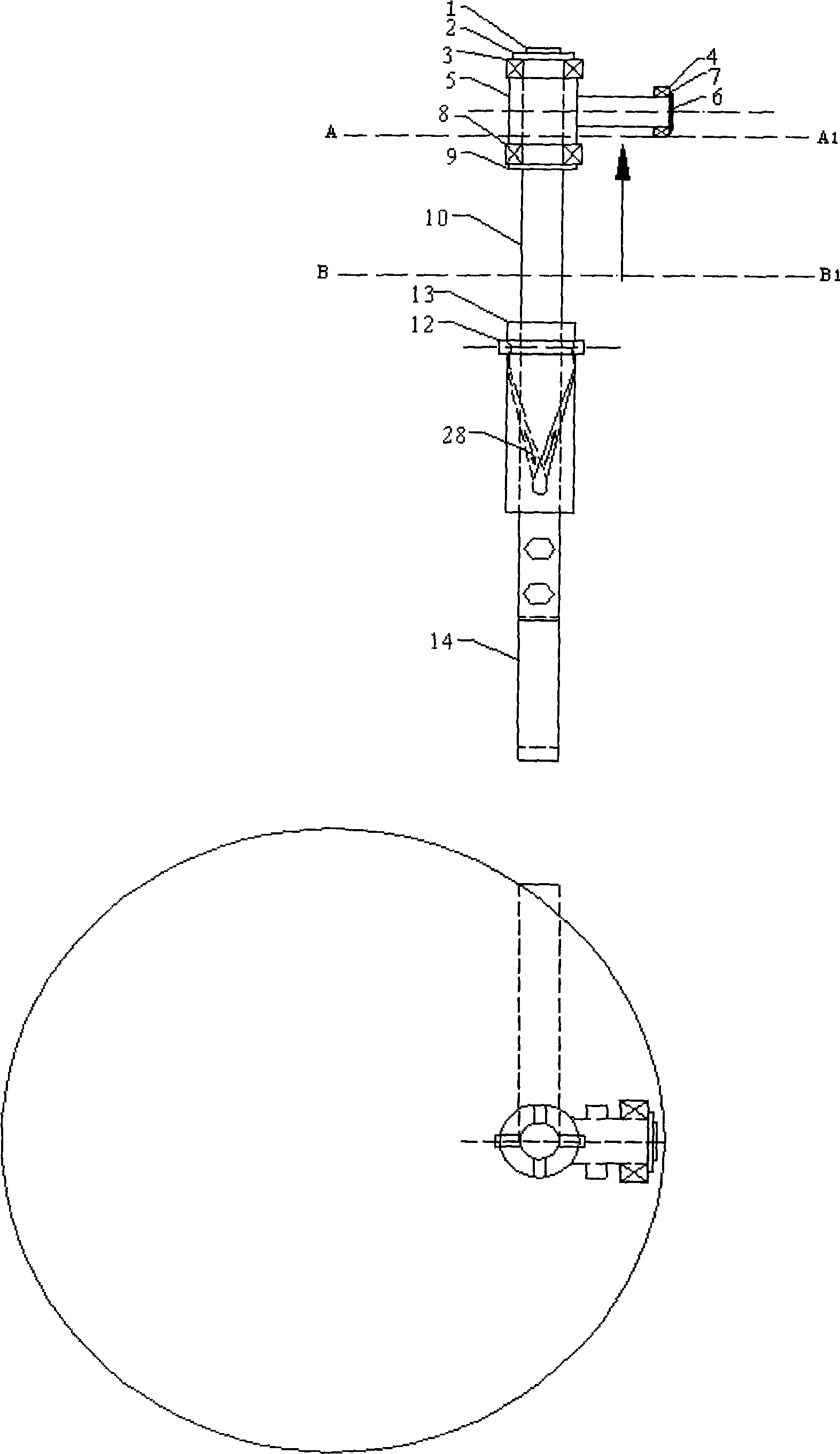
[0012] The cutter shaft system includes cutter 14, rotating shaft 10 with stop ring, limit pin 12, axial bearing 3, 8, bolt 1, shaft end retaining ring 2, T-shaped sleeve 5, radial bearing 4, cutter Knife links to each other with rotating shaft 10 by bolt, and rotating shaft is in the sleeve 13 that links to each other with rotating disk, and limit pin 12 passes through rotating shaft 10 and engages with the helical guide rail of sleeve 13. The rotation angle of the rotating shaft 10 is determined b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More