

Essentially nonlinear compensation controller of servo system
A nonlinear compensation, servo system technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of complex method, difficult to apply engineering practice, unfavorable practical application and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
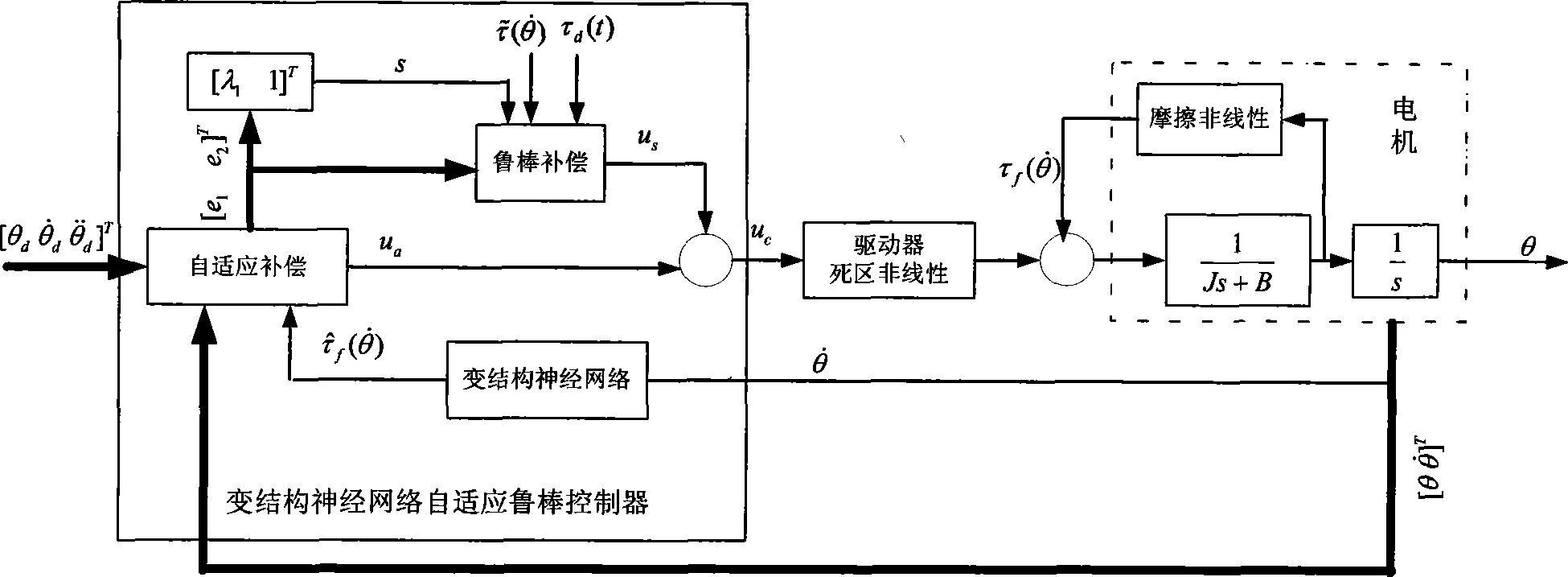
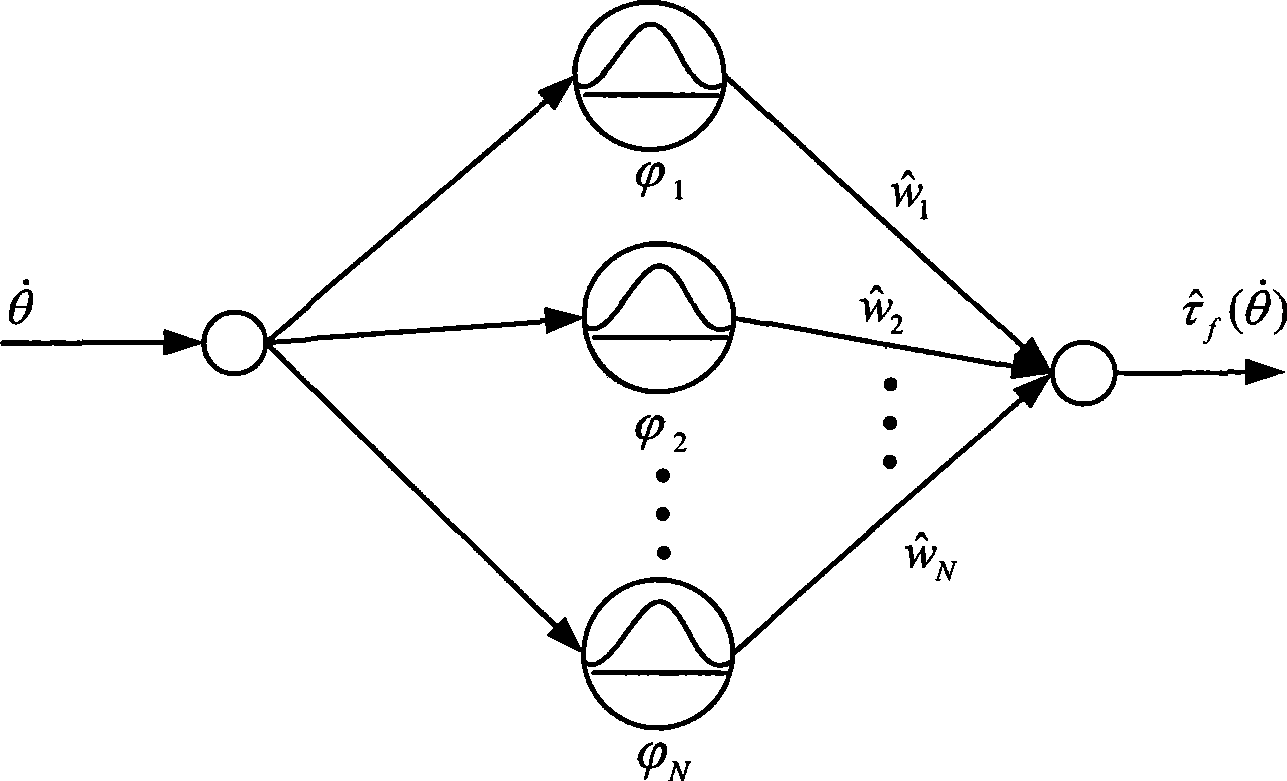
[0052] The core idea of the present invention is to adopt the variable structure neural network to approach the unknown nonlinear function (friction nonlinearity) in the servo system, realize the friction compensation and have a small network scale; use the adaptive robust control technology to learn the network weight and Other unknown parameters can suppress external disturbances and modeling errors of the system, and improve the response speed, steady-state accuracy and robust performance of the servo system.
[0053] The TMS320DSP2812 processor is used as the hardware platform to realize the control algorithm, and the invention is applied to the DC torque motor position servo system to verify the superiority of the invention.
[0054] The implementation steps of the controller are as follows:
[0055] ① Input by reference And the sensor collects the system state quantity Calculate the error vector e ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More