

Hydraulic locking power mechanism of mechanical arm joint for surgery
A technology of surgical operation and power mechanism, which is applied in the field of medical devices, and can solve the problems of no joint locking mechanism found, no surgical manipulator joint locking structure and locking drive device, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be described in further detail below in conjunction with the accompanying drawings.
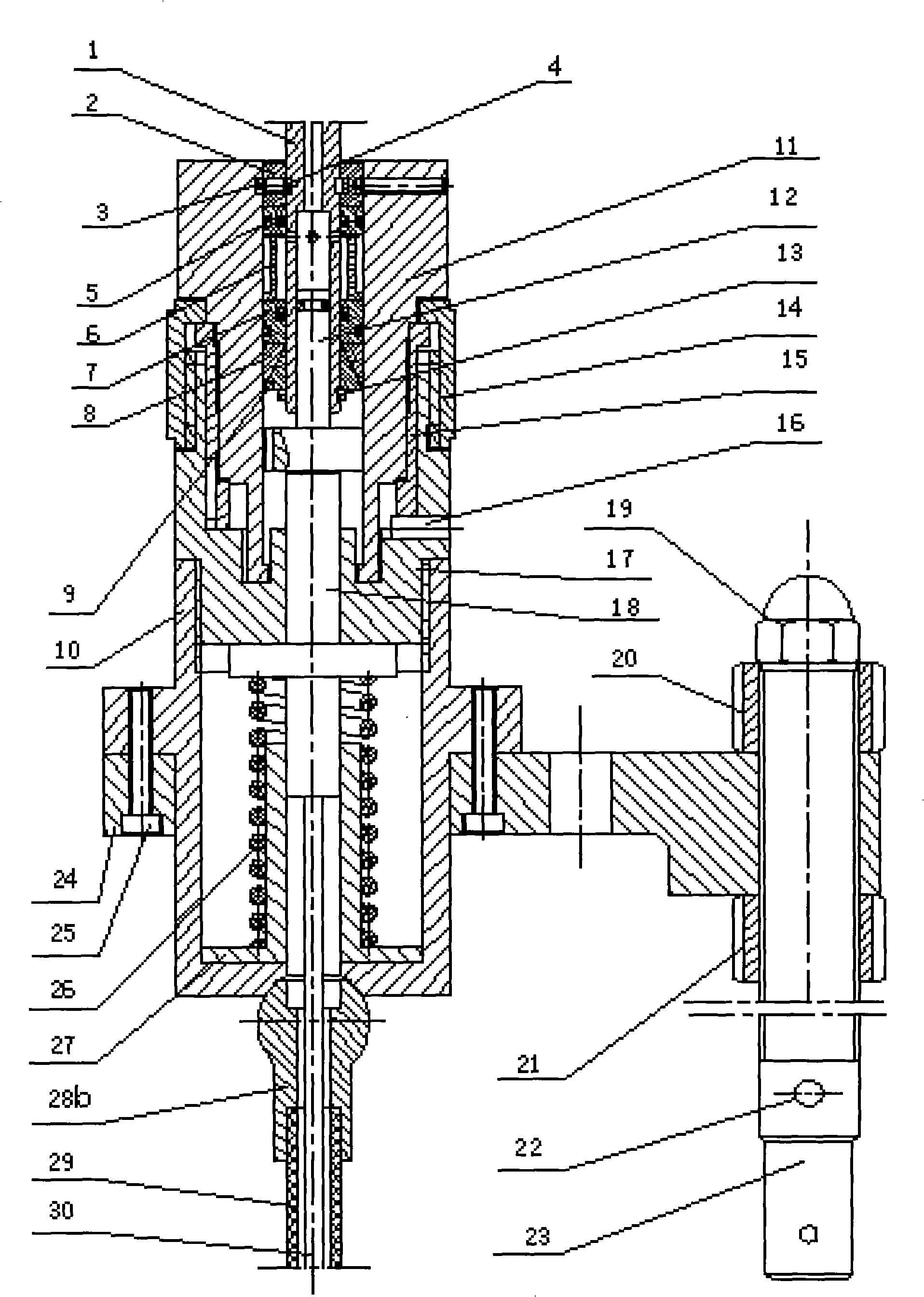
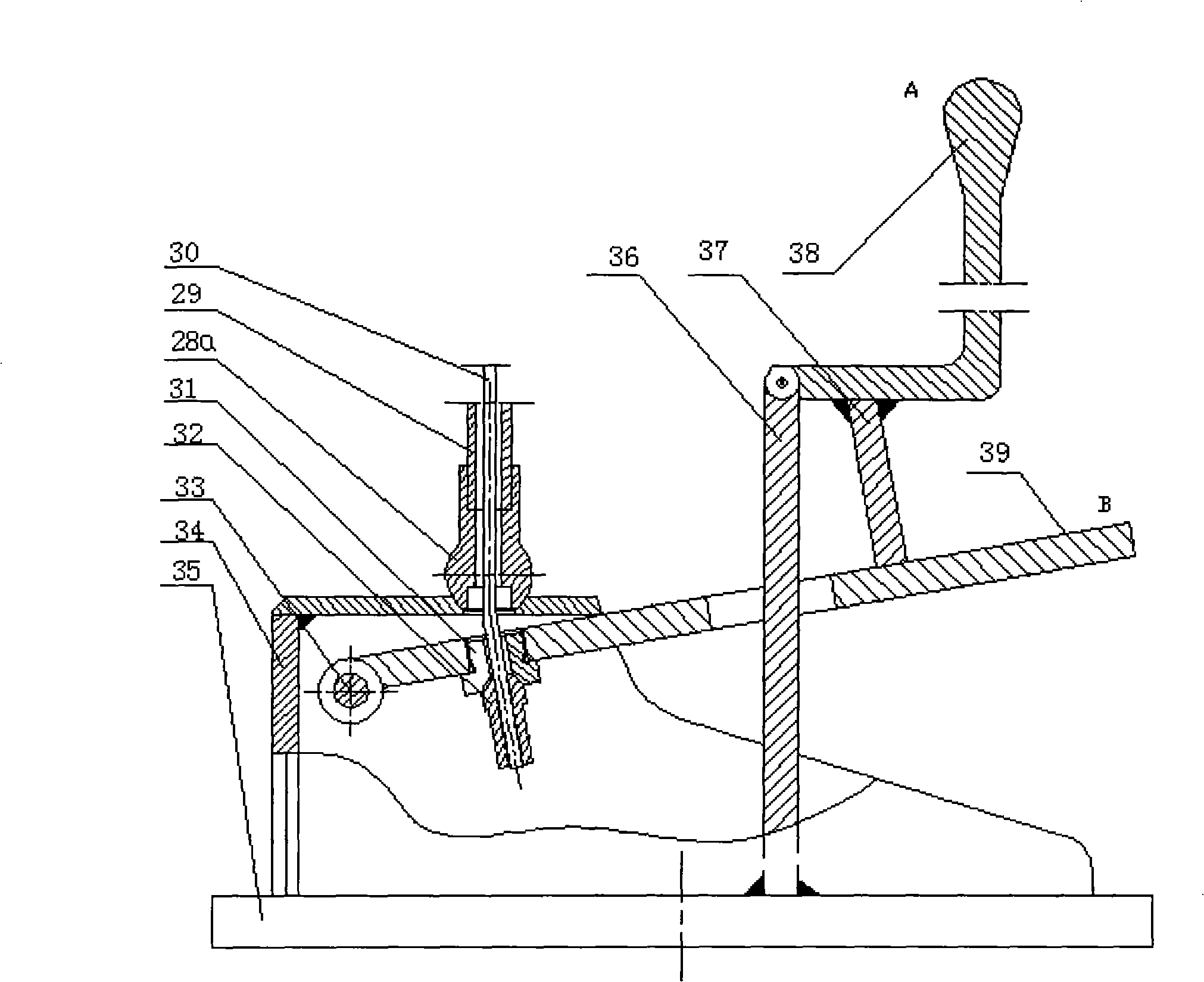
[0016] figure 1 It is a schematic diagram of the lifting and lowering mechanism and the locking force generator of the joint hydraulic locking power mechanism of the surgical manipulator; figure 2 It is a schematic diagram of the traction mechanism of the joint hydraulic locking power mechanism of the surgical manipulator.
[0017] The present invention provides a hydraulic locking power mechanism for surgical manipulator joints, which includes a traction mechanism 40, a lifting and lowering mechanism 41, and a locking force generator 42. The piston push rod 18 of the decompression mechanism 41 is fixedly connected, and the traction mechanism 40 includes a pedal 39, which is connected with the steel wire 30; 24 is fixedly connected with the lifting column 23; the central axis of the lifting and lowering mechanism 41 and the axis of the lifting column 23 ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More