

Service robot grasp guidance system and method thereof
A service robot and guidance system technology, applied in the field of service robot grasping and guidance systems, can solve the problems of low recognition accuracy, limited recognition ability, and poor effect, and achieve the effect of enhancing recognition ability and improving recognition accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
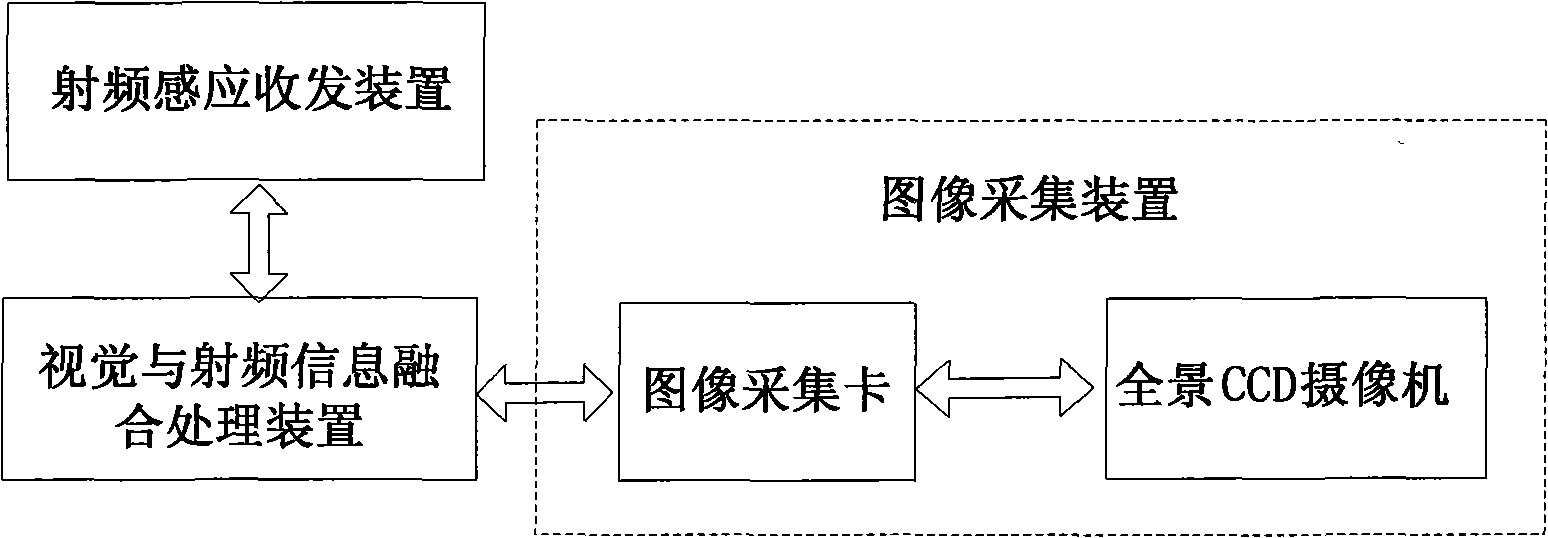
[0025] Such as figure 1 As shown, the service robot grasping and guiding system involved in this embodiment is composed of an image acquisition device, a radio frequency induction transceiver device, and a vision and radio frequency information fusion processing device, wherein:
[0026] The image acquisition device includes a panoramic CCD camera and an image acquisition card. The panoramic CCD camera uses SONY RPU-C2512 panoramic camera, 2 million pixels, 24-bit true color, installed on the head of the robot, the lens is 1.52 meters away from the ground, and is use...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More