

Lead obstacle-crossing robot walking device
A walking device and robot technology, applied to cable installation devices, manipulators, motor vehicles, etc., to achieve the effects of improved crawling angle, light weight, and wide adaptability to obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
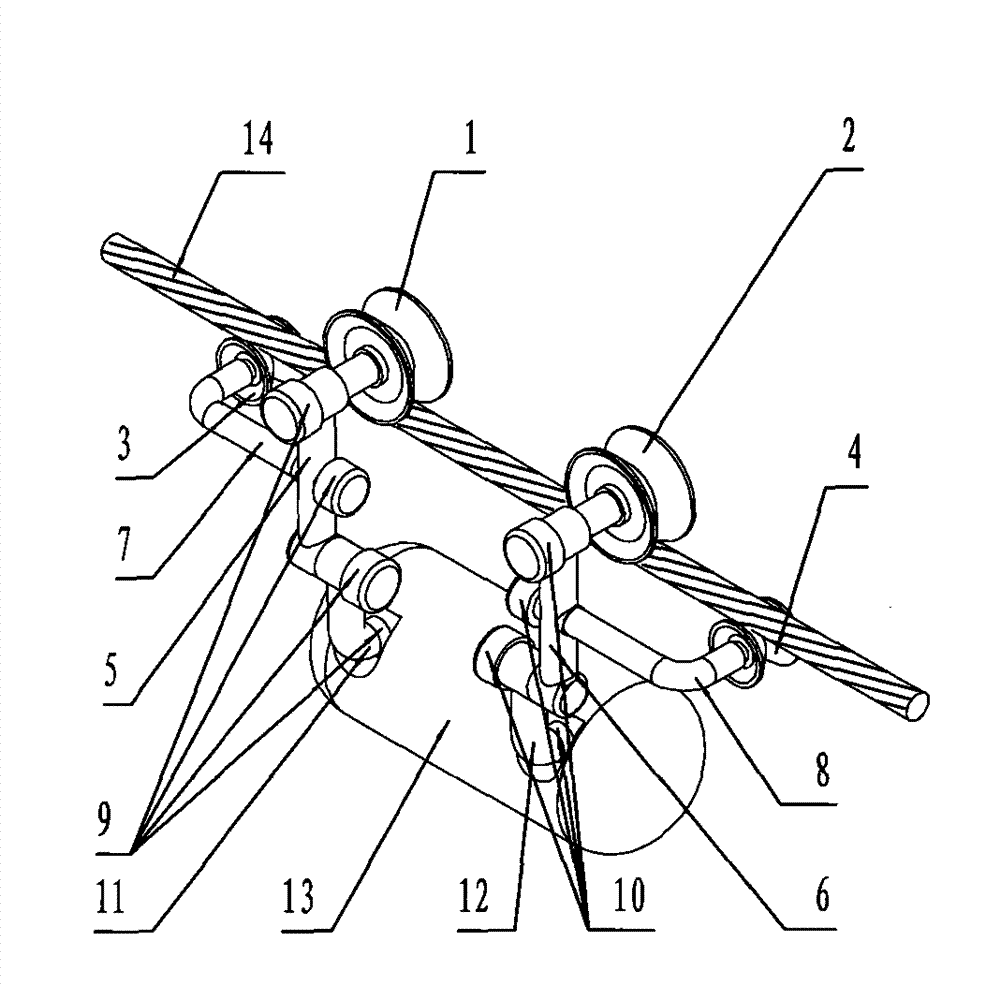
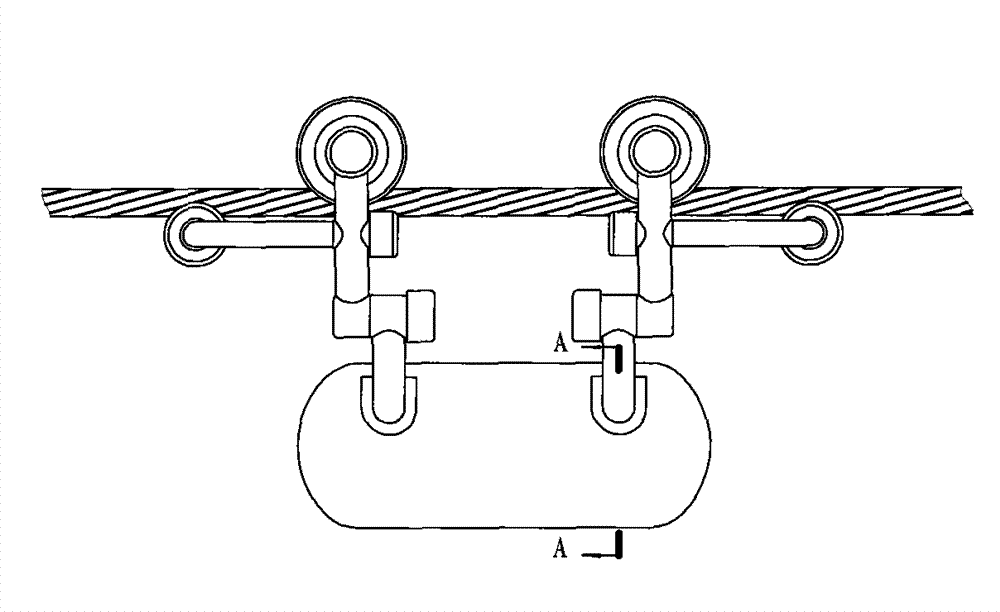
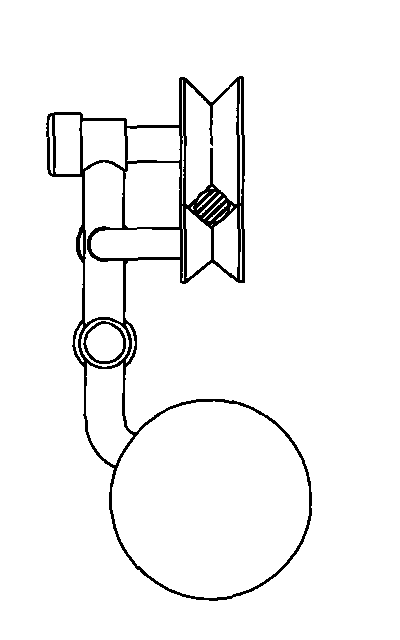
[0060] Such as figure 1 Shown is the three-dimensional schematic diagram of the overall structure of the obstacle-crossing single wire and multi-split wire robot walking device of the present invention, figure 2 is the front view of the device, image 3 It is the left side view of the device. The obstacle-crossing single wire and multi-split wire robot walking device of the present invention includes a front traveling wheel 1, a rear traveling wheel 2, a front pressing wheel 3, a rear pressing wheel 4, and a front traveling wheel arm 5. Back travel wheel arm 6, front compression wheel arm 7, rear compression wheel arm 8, four front motors 9, four rear motors 10, front joint arm 11, rear joint arm 12 and body 13, the body 13 is an ellipsoid, and the body 13 includes a drive motor for driving the articulated arm, a reduction box, a control system and a power supply. The lower end of front articulated arm 11 and rear articulated arm 12 links to each other with the body 13 of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More