

Intelligent control method for travelling system of spreader
A technology of intelligent control and walking system, applied in controllers with specific characteristics, two-dimensional position/channel control, electric controllers, etc. Solve the problems of paver walking deviation and the control system can not automatically correct the deviation, so as to improve the construction quality, solve the walking deviation, and improve the operation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
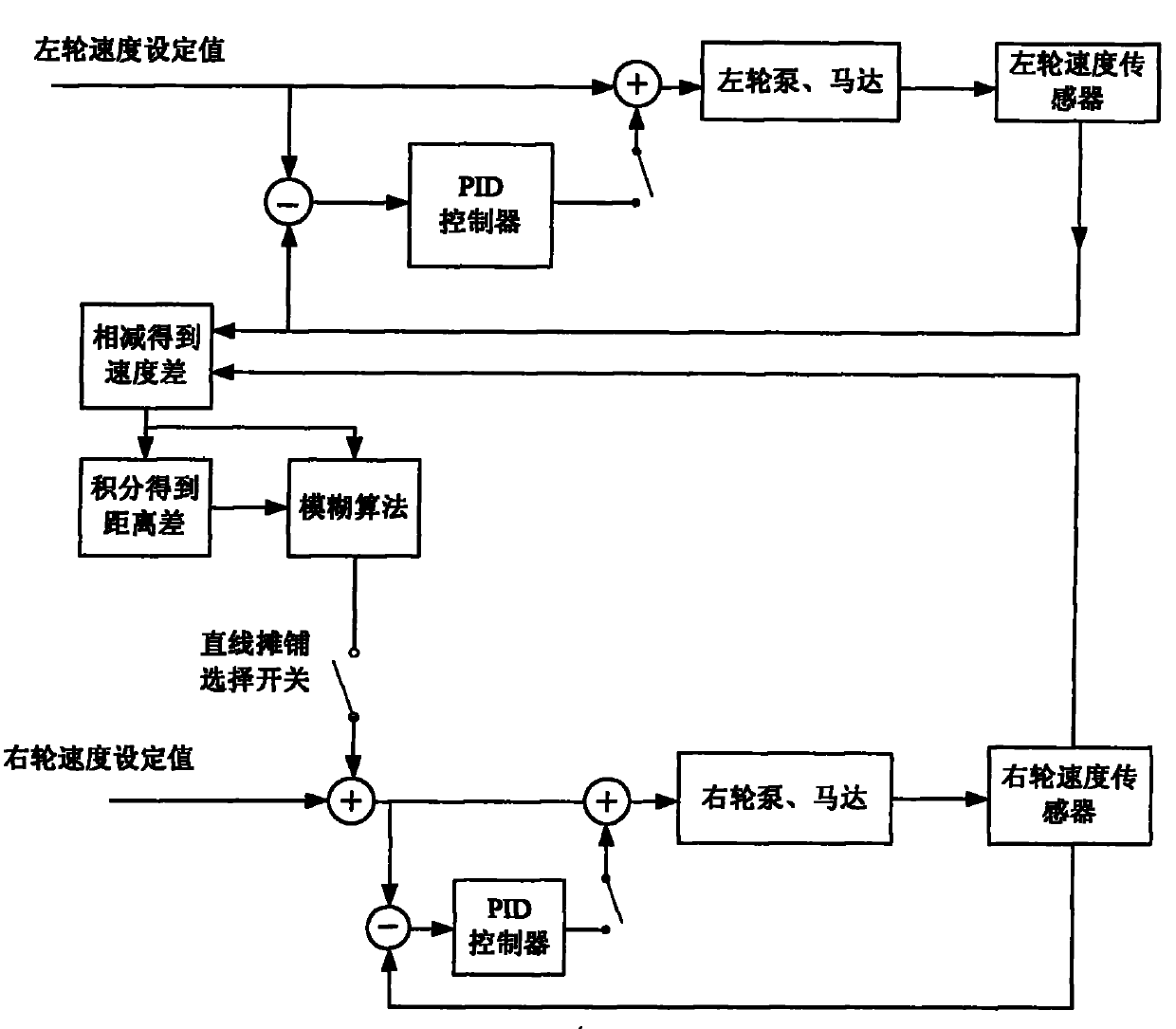
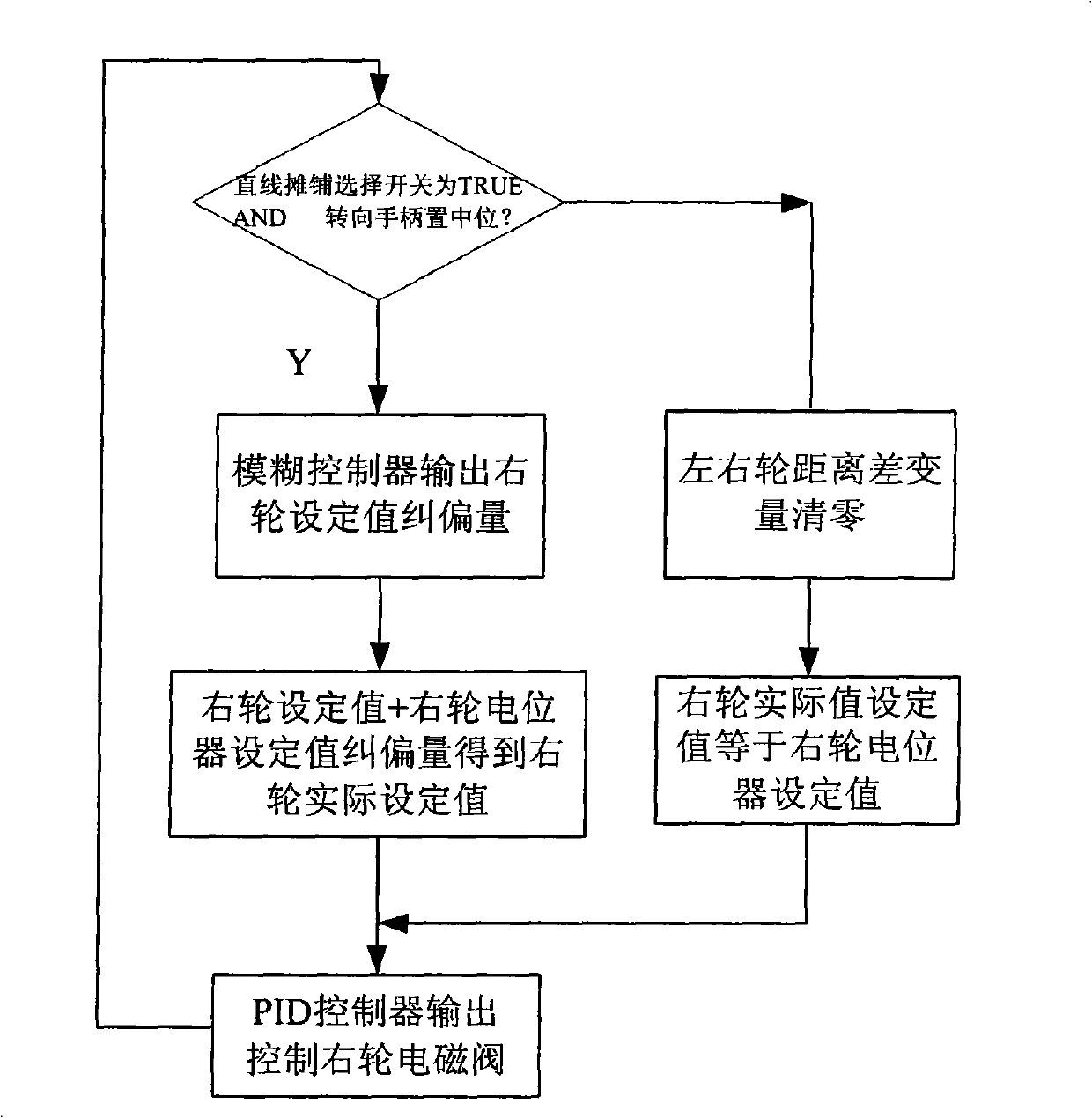
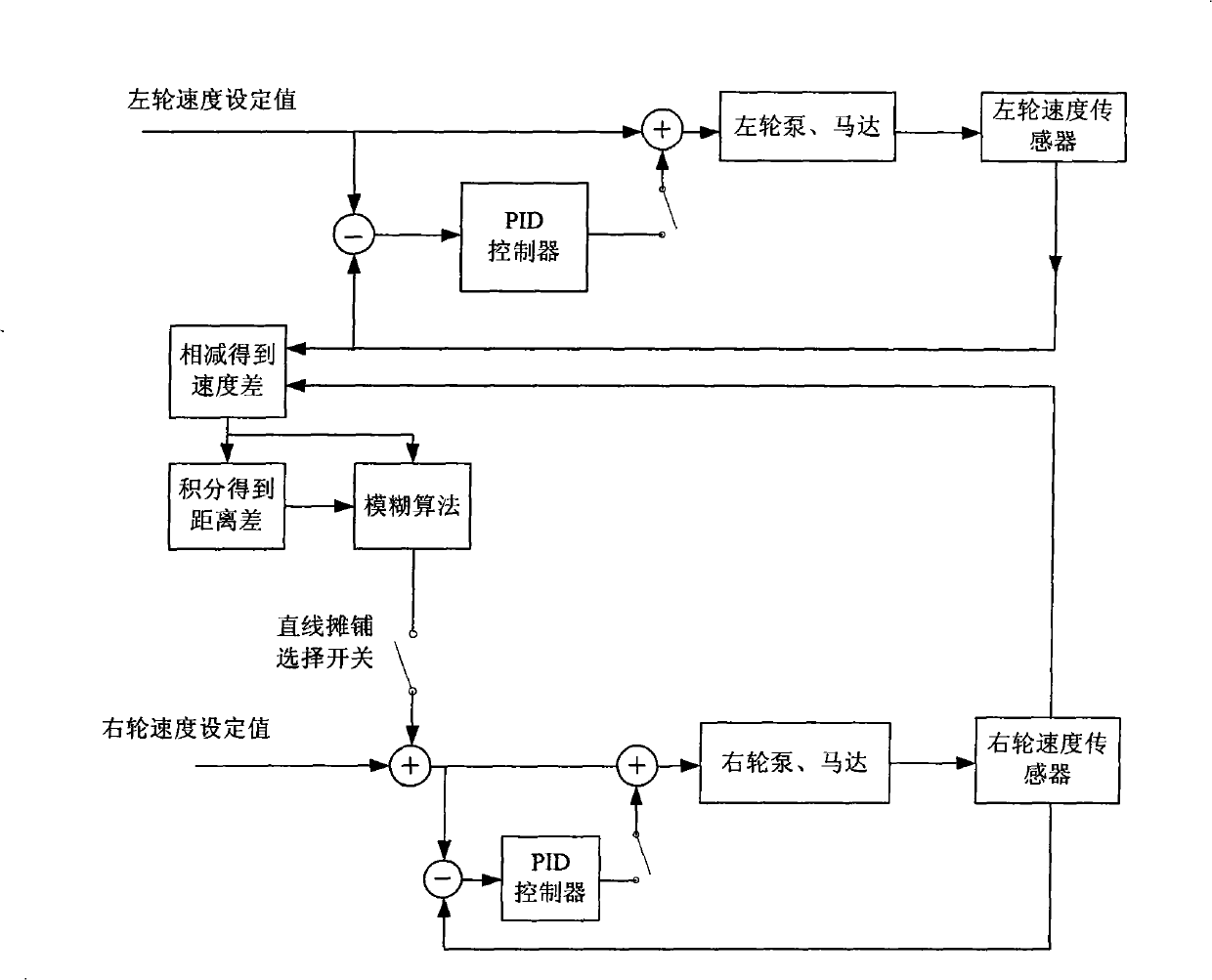
[0016] Example 1: In figure 1 , figure 2 Among them, the specific control process of the paver walking system of the present invention is: when the paver is in the straight line paving operation, the left wheel adopts single closed-loop control, that is, the set value of the left wheel and the output value of the left wheel PID controller are superimposed and output to control the left wheel. Pumps and motors work. The actual speed of the left wheel hydraulic motor is compared with the set value of the potentiometer, and the incremental PID is used to eliminate the deviation to achieve the constant speed control of the left wheel and ensure the overall walking speed of the paver. The right wheel adopts fuzzy PID intelligent control scheme. Set the linear paving deviation correction selection switch on the control panel of the paver. When the switch is at a high potential, subtract the actual speed of the left and right wheels to obtain the speed difference between the left ...
Embodiment 2
[0020] Example 2: figure 1 When the paver is in a non-straight paving operation (such as turning paving), the straight paving selection switch is at low potential, the fuzzy controller quits the control of the right wheel, and the variable of the distance difference between the left and right wheels in the software is automatically cleared to ensure the next step. One-time controls are not affected. At this time, the left and right wheels of the paver walking system are under independent single closed-loop control.
[0021] image 3 Among them, the upper dotted line is the upper limit value of the controller output, the lower dotted line is the lower limit value of the controller output, the straight line in the middle is the input setting value of the potentiometer, and the curve between the upper dotted line and the lower dotted line is the controller output value. Output the actual value. In the PID control of the above-mentioned paver constant speed control, the output c...
Embodiment 3
[0022] Example 3: figure 1 , when the paver walking system is in an open-loop state, the PID controller of the left wheel is disconnected, and the set value of the left wheel is directly output to control the pump and motor of the left wheel hydraulic system. The PID controller and fuzzy controller of the right wheel are all disconnected, and the set value of the right wheel is directly output to control the work of the pump and motor of the right wheel hydraulic system.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More