

Coarse alignment method for fiber optic gyro strapdown inertial navigation system based on single axis rotation
A strapdown inertial navigation and fiber optic gyroscope technology, applied in the field of measurement, can solve the problems of poor alignment effect and poor alignment performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
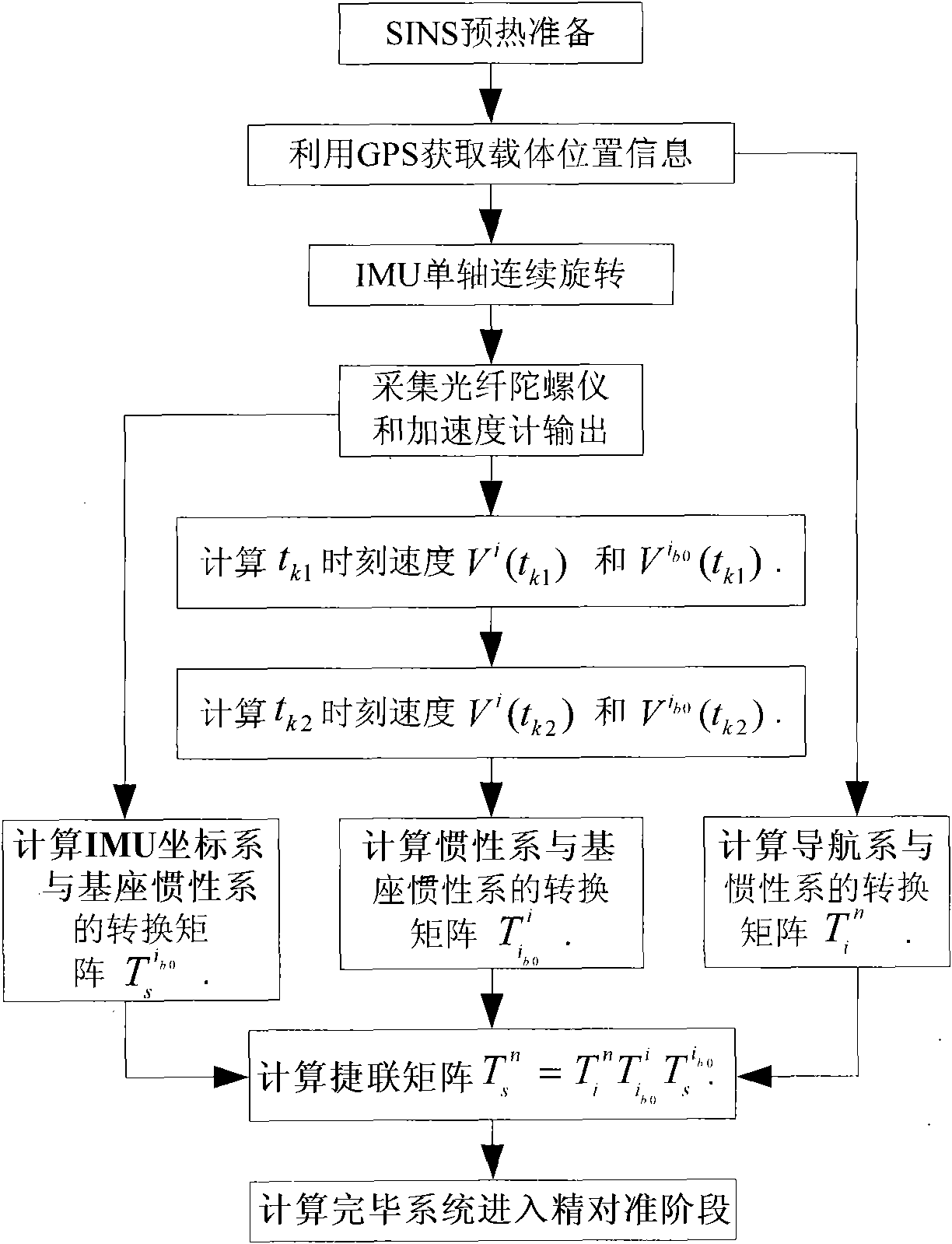
[0075] The specific embodiments of the present invention will be described in detail below with reference to the accompanying drawings:
[0076] (1) Determine the initial position parameters of the carrier through GPS and bind them to the navigation computer;
[0077] (2) The strapdown inertial navigation system prepares for warm-up, collects the data output by the fiber optic gyroscope and the quartz accelerometer and processes the data;
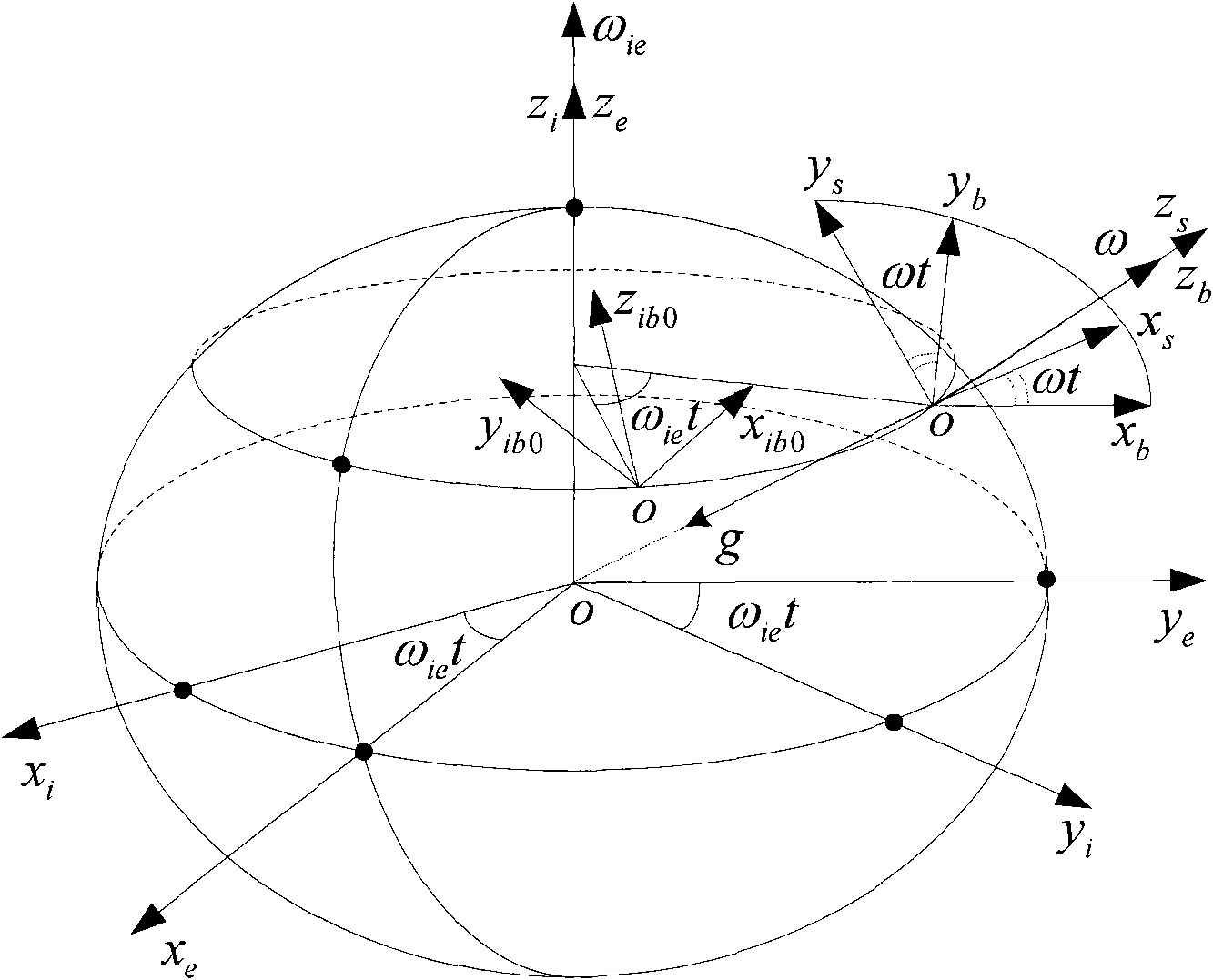
[0078] (3) According to the mutual positional relationship of the coordinate system (as attached image 3 ) Determine the conversion matrix T between the navigation coordinate system and the inertial coordinate system i n .
[0079] Where T e n It is the transformation matrix between the navigation coordinate system n and the earth coordinate system e, which can be determined by the longitude and latitude (L, λ) of the point where the carrier is located.
[0080] T e n = 1 0 0 0 sin L cos L 0 - co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More