

Self-alignment method of vehicle strapdown inertial navigation system under moving base
A strapdown inertial navigation and moving base technology, applied in the field of kalman filtering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
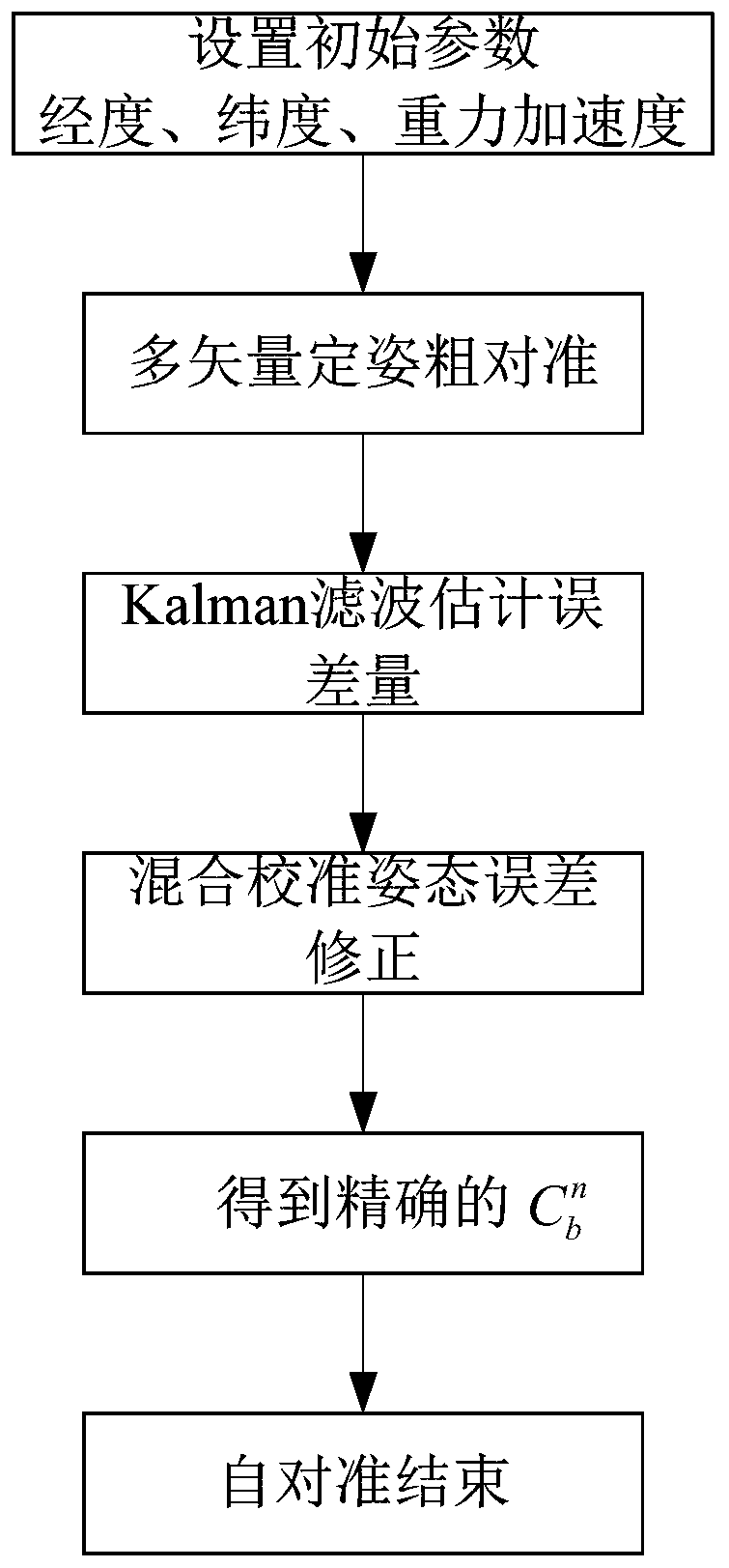
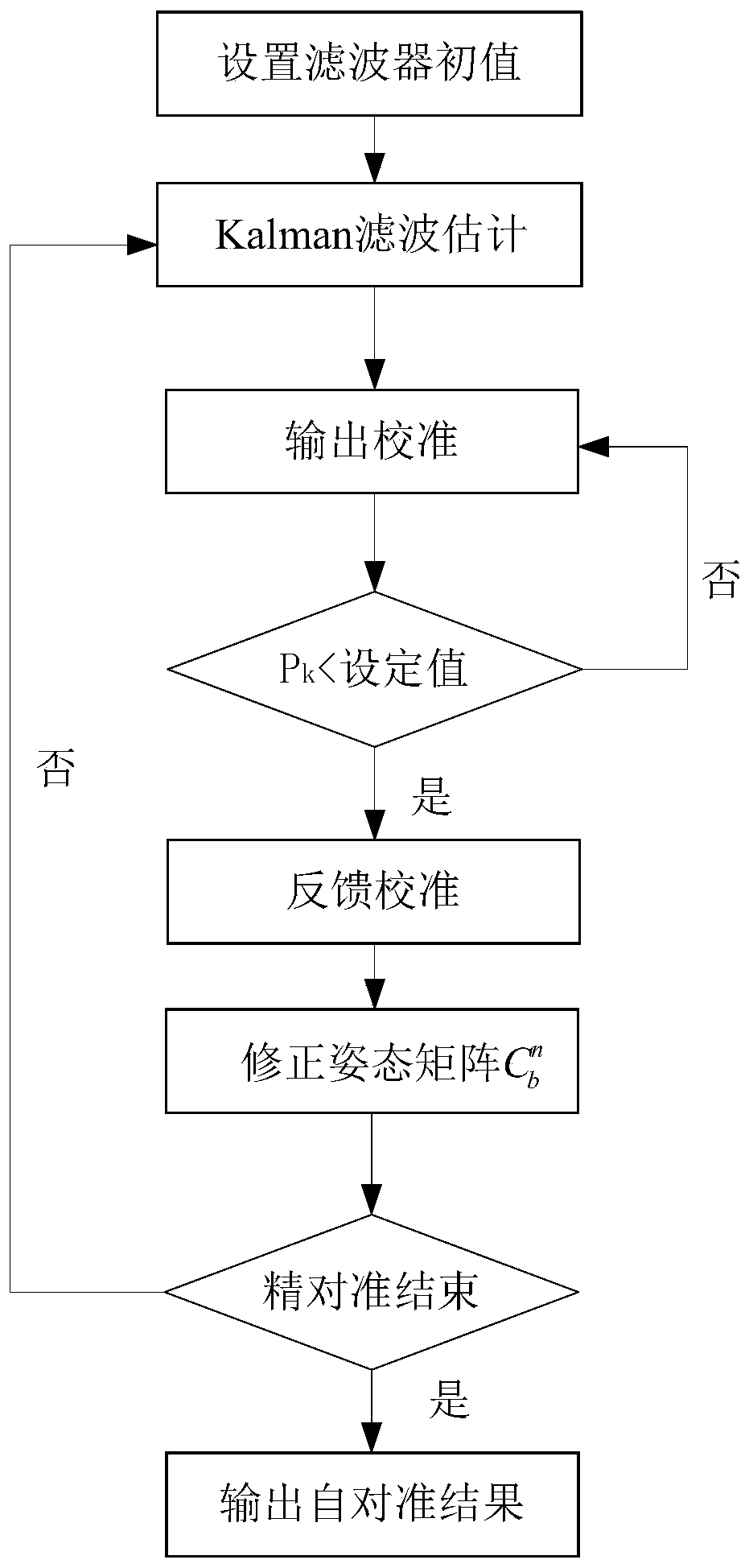
[0077] Combine below figure 1 and figure 2 The specific implementation steps of the present invention are described in detail:
[0078] In the detailed description of the implementation steps below, the coordinate system is defined as follows:
[0079] Earth coordinate system e system: the origin is the center of the earth, the X-axis is located in the equatorial plane, pointing from the center of the earth to the meridian of the point where the carrier is located, the Z-axis is along the direction of the earth's rotation axis, and rotates with the earth's rotation, and the X-axis, Y-axis and Z-axis form The right-handed coordinate system rotates with the rotation of the earth.
[0080] Earth-centered inertial coordinate system i system: Inertial coordinate system refers to a reference coordinate system that is static in space or moves in a straight line at a uniform speed. The origin of the geocentric inertial coordinate system is taken at the center of the earth O e The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More