

Vision-based target tracking system using unmanned helicopter
An unmanned helicopter, target tracking technology, applied in the field of intelligent control and machine vision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
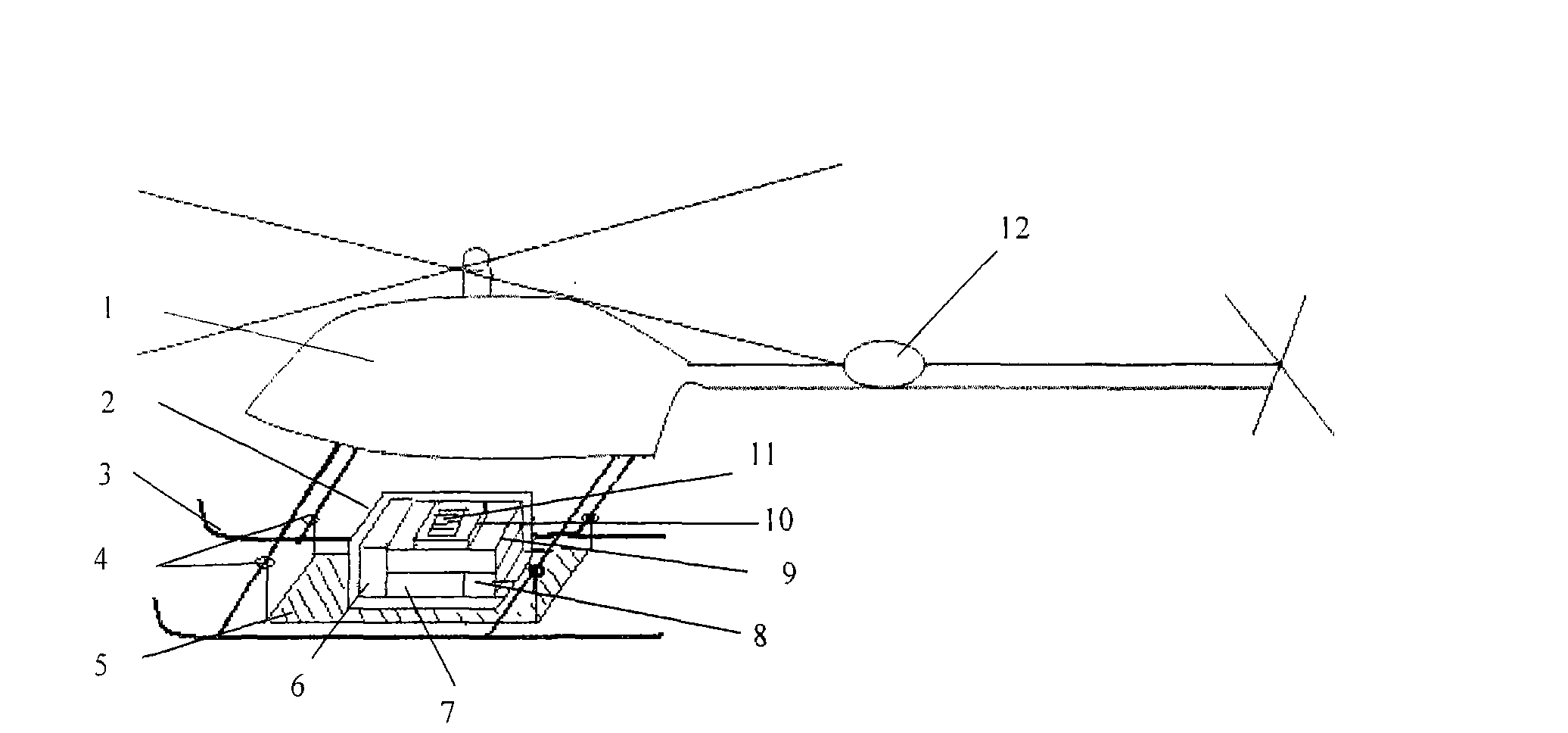
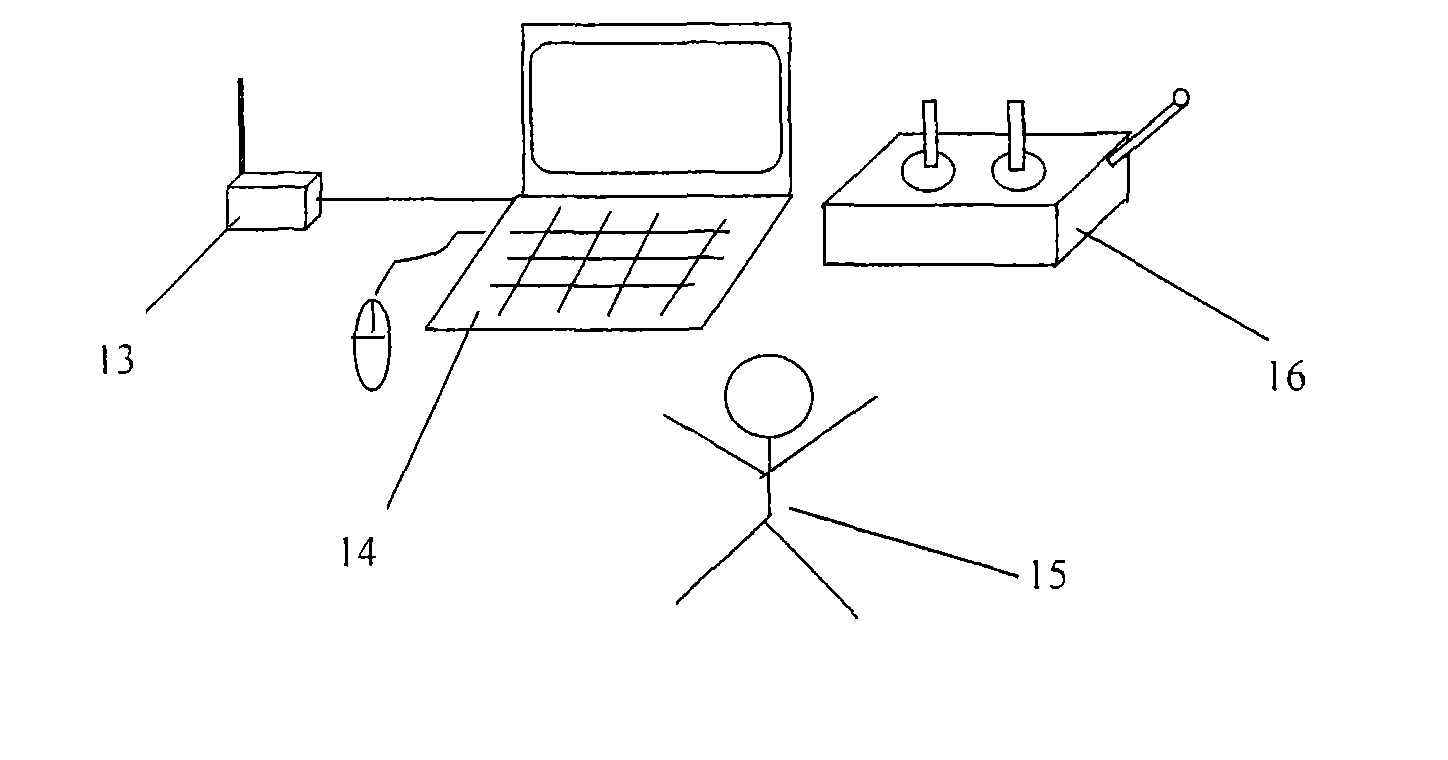
[0021] See also Fig. 1 (a), Fig. 1 (b), be unmanned helicopter vision navigation system of the present invention, system of the present invention is made up of two parts: a part is helicopter and airborne equipment, referring to Fig. 1 (a); One part is the ground control station, see Figure 1(b). Among them, the helicopter and airborne equipment include micro-helicopter 1, equipment shell 2, landing gear 3, flexible connection 4, equipment tray 5, altimeter 6, embedded controller (including multi-way switch) 7, wireless communication module 8, GPS Receiver 9, inertial navigation unit 10, battery pack 11, GPS receiving antenna 12, vision unit and wireless video transmission module 13, camera and gyro locking device 14, wireless communication module 15; Ground control station, including ground control computer 16, ground Operator 17, model helicopter remote controller 18, wireless video receiving module 19, video converting module 20.
[0022] Among helicopters and airborne equ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More