

Action control method of under-actuated biped robot
A biped robot, motion control technology, applied in non-electric variable control, position/direction control, control/regulation system, etc., can solve the problem of low real-time performance, poor engineering practicability, and underactuated biped robot stabilization speed Not fast enough, etc., to achieve the effect of strong engineering practicability and high real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
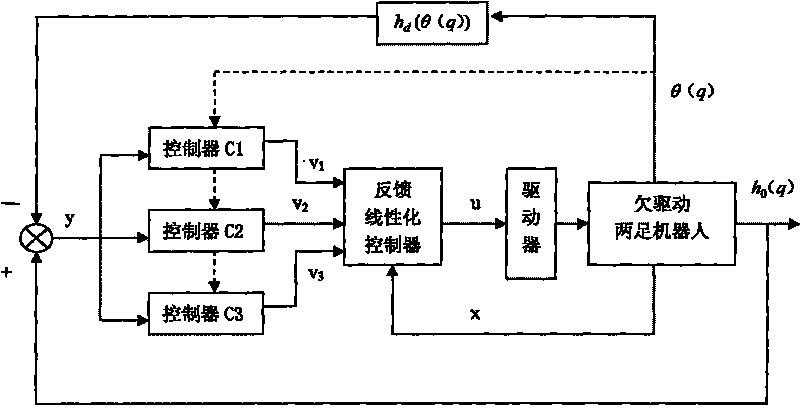
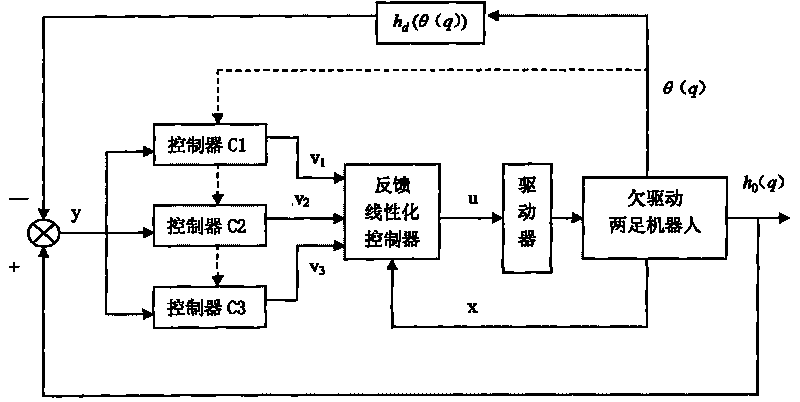
[0018] In this example, as shown in the attached figure, there are three multi-model controllers, denoted as C 1 、C 2 、C 3 , the controller C 1 、C 2 、C 3 It is an existing technology, such as a PD controller; y is calculated by a multi-model controller, and three control quantities are obtained, which are respectively denoted as v 1 , v 2 , v 3 ; u is the actual control quantity. The control process of the motion control method of the underactuated biped robot of the present invention is as follows:
[0019] (1) Establish the motion control mathematical model of the underactuated biped robot:
[0020] x · = f ( x ) + g ( x ) u , In this for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More