

Method for indoor spray-finishing by using robot spraying system
A robot and spray booth technology, applied in the field of robots, can solve the problems of inability to walk, limit the application field of robots, and the inability of robots to walk, and achieve the effect of uniform spraying
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
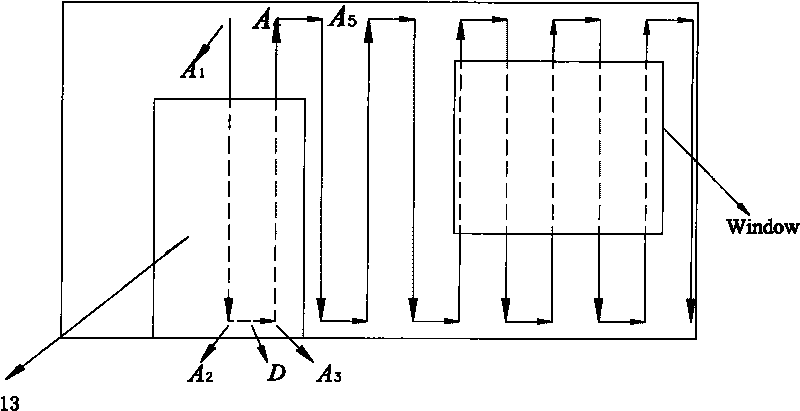
[0046] see figure 1 , the method in the spraying room of the robot spraying system is performed as follows:
[0047] C0. Define the spatial coordinates of the house through computer CAD software: take the floor plane of the house as the XOY plane of the O-XYZ three-dimensional coordinates, choose a vertical line as the Z axis, and define the three-dimensional coordinates of the space; in general, you can directly select the left wall The intersection line with the floor is the X axis, the intersection line between the right wall and the floor is the Y axis, and the intersection line between the left and right walls is the Z axis;
[0048] C1. Through the data interface, read the house data into the main controller of the robot spraying system; read the house data:
[0049] The house data read by the robot includes: the number and number of rooms in the house; the number and number of walls in each room; the spatial three-dimensional coordinates of the four vertices of each wa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More