

Single camera calibration method based on road surface collinear three points and parallel line thereof
A single-camera, parallel-line technology, applied in image analysis, image data processing, instruments, etc., to achieve the effect of ensuring pertinence and versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
[0020] Camera calibration method of the present invention comprises the following steps:
[0021] 1. Selection of calibration target and establishment of relevant coordinate system
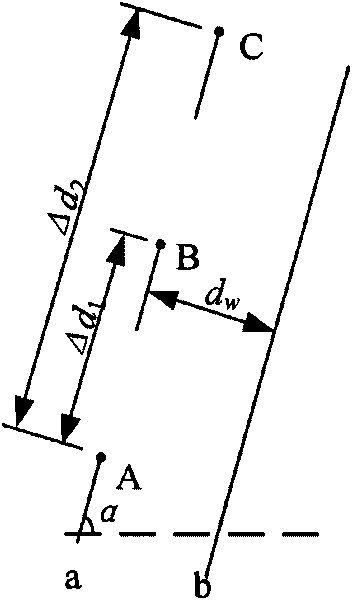
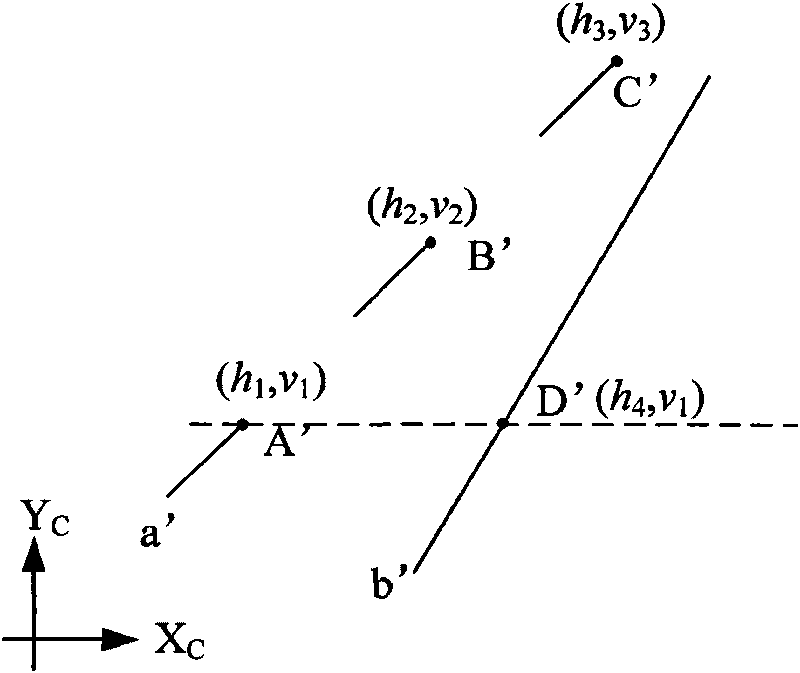
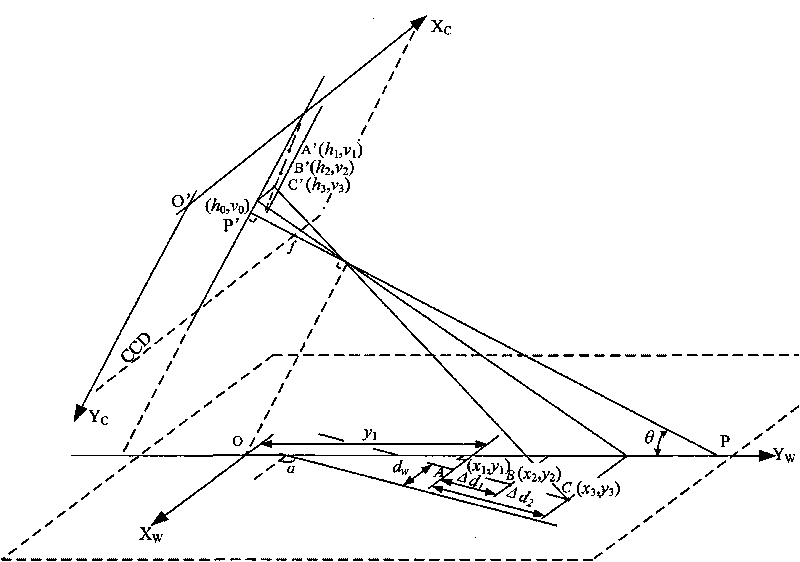
[0022] In the traffic scene, select the calibration target, that is, two parallel lines with a known distance on the road surface and three points on one of the parallel lines. Two parallel lines on the actual road surface are denoted as a and b respectively, and the distance between the two lines a and b is measured in advance as d w . The three points represent points A, B, and C respectively, among which point A is the closest to the camera, and point C is the farthest from the camera. The distance between the two points A and B is measured in advance as Δd 1 , the distance between two points AC is Δd 2 , and assume that the coordinates of point A in the tw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More