

Walking mechanism of cam driving control type quadruped robot
A quadruped robot, drive control technology, applied in the direction of motor vehicles, transportation and packaging, can solve the problems of complex structure, low control precision and high cost, and achieve the effect of overcoming complex structure, high control precision and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031]The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
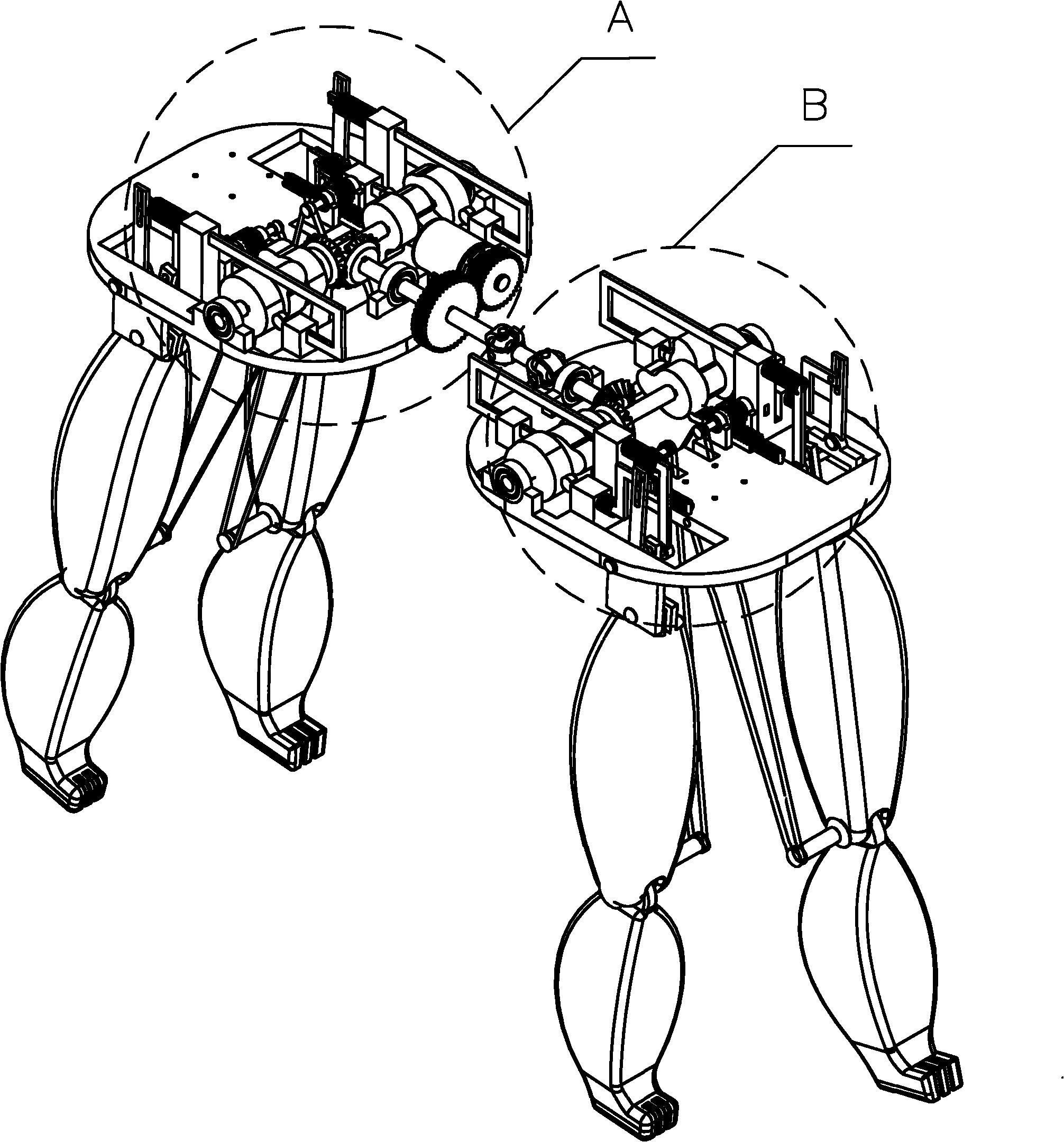
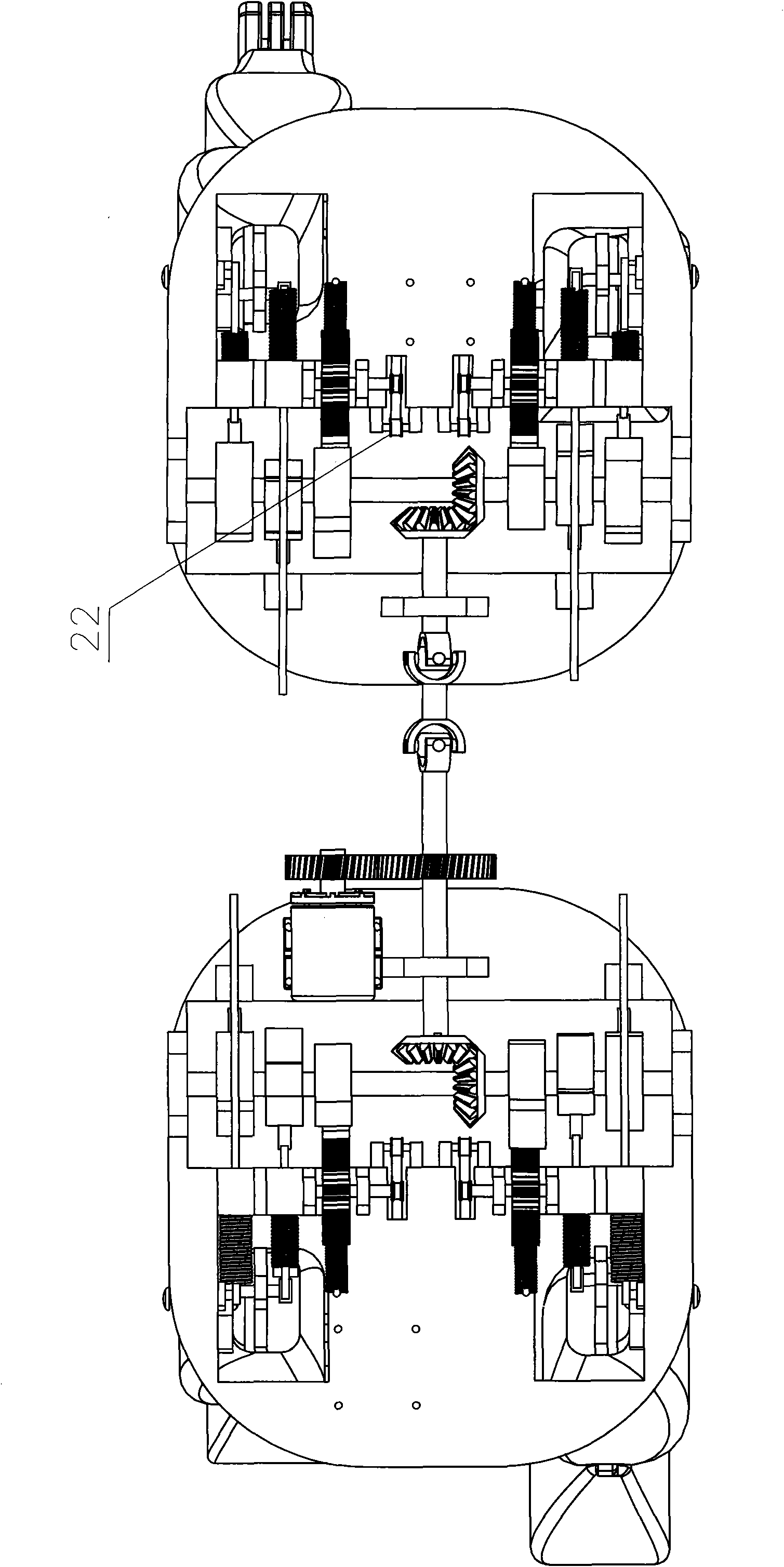
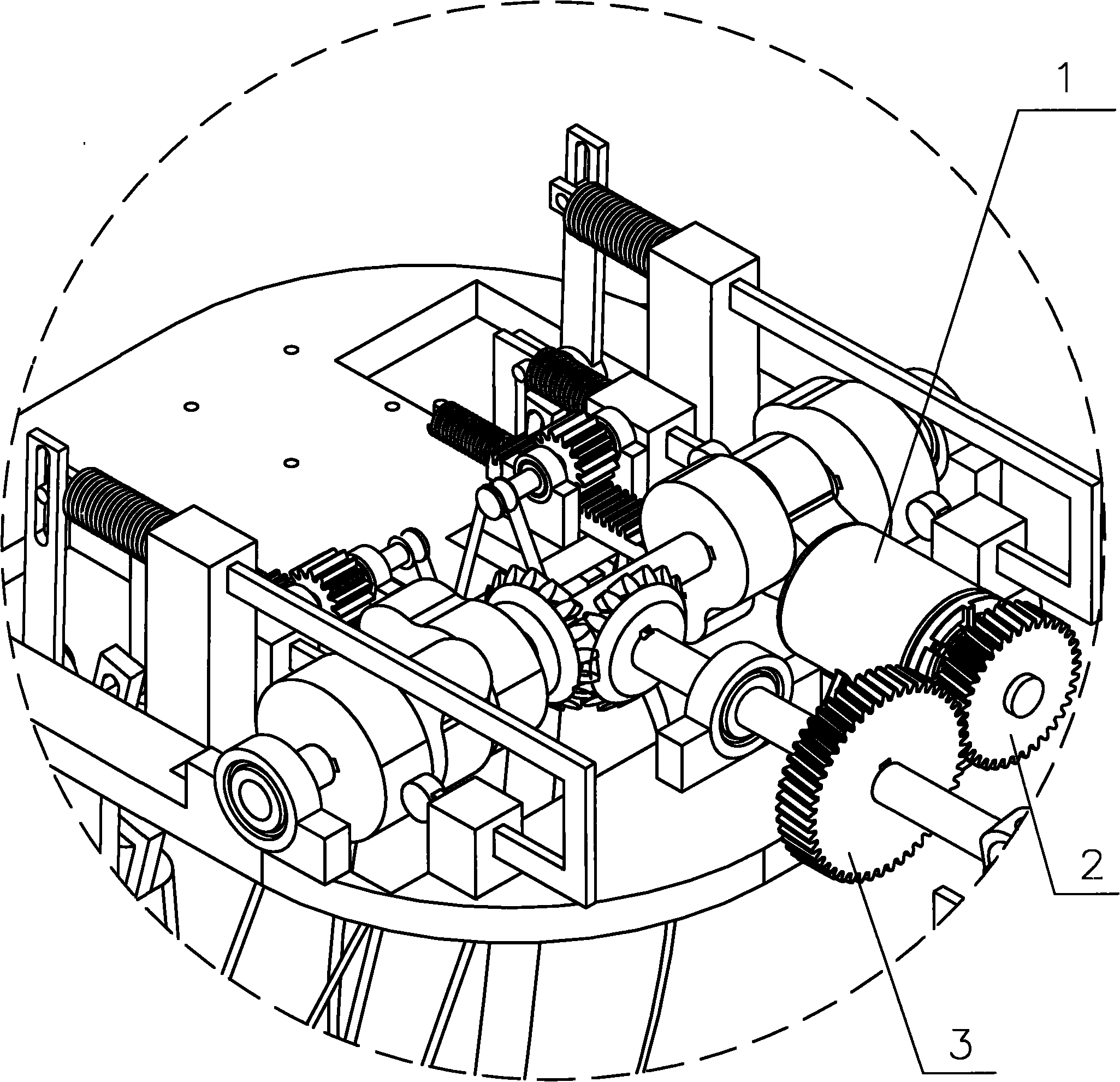
[0032] According to an embodiment of the present invention, a walking mechanism of a cam-driven quadruped robot is provided. Such as Figure 1-Figure 5 As shown, this embodiment includes: a front leg assembly and a rear leg assembly arranged vertically in parallel with the same structure, the front leg assembly includes a left front leg assembly and a right front leg assembly, and the rear leg assembly includes a left rear leg assembly and a right rear leg assembly The front leg fixed support frame 23 installed on the top of the front leg assembly and used to fix and support the front leg assembly is installed horizontally, and the rear leg fixed support frame 23 ins...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More