Carrying device for underwater movable platform of remote control submersible
A technology for remote-controlled submersibles and mobile platforms, which is applied to underwater ships, underwater operating equipment, motor vehicles, etc. Lower the loading weight of the mobile platform, etc., to achieve the effect of reducing the loading weight, simple and reliable structure, and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings.
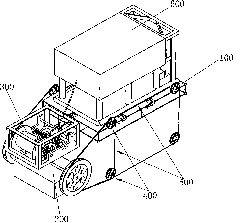
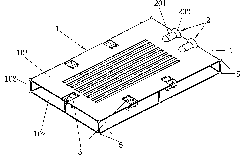
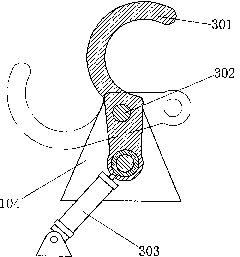
[0028] Such as figure 1 , 11 As shown, the present invention is typically installed in a non-pressure resistant structure 800 on top of an underwater mobile platform 700 . The present invention includes a traction winch 200 and a guiding lifting platform 100. The traction winch 200 is connected to the guiding lifting platform 100 through a traction steel cable 500 and a fixed pulley block 400. A neutral cable retractable winch 300 is arranged above the traction winch 200, and a neutral cable retractable The winch 300 is used for retracting and releasing the neutral cable of the ROV. After the ROV 600 is recovered, the ROV 600 is positioned and locked on the guiding elevating platform 100 , and lowered together with the guiding elevating platform 100 into the non-pressure-resistant structure 800 .
[0029] Such as fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com