Autonomous navigation guidance method used for pilotless plane
An unmanned aircraft and autonomous navigation technology, applied in the aviation field, can solve problems such as unfavorable autonomous navigation capabilities of unmanned aircraft, difficulty in updating routes and occupancy of unmanned aircraft in a timely manner
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical scheme of the present invention is described in detail below in conjunction with accompanying drawing:
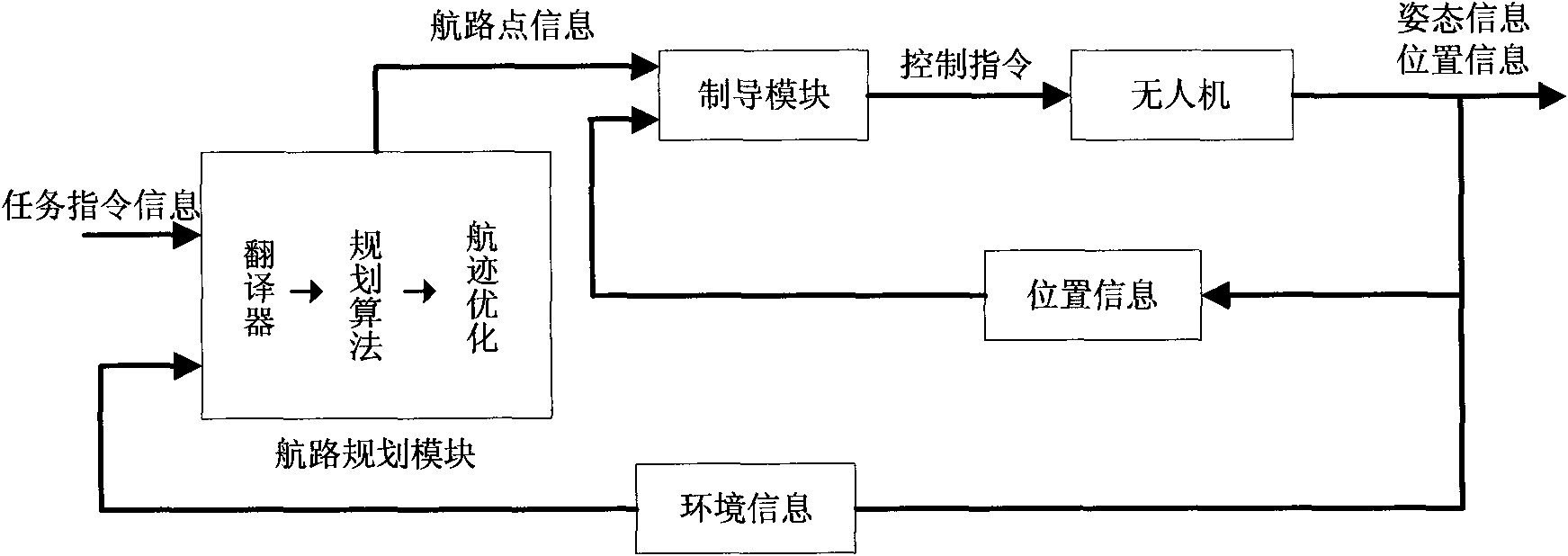
[0034] The present invention mainly includes two modules, namely a navigation module and a guidance module.
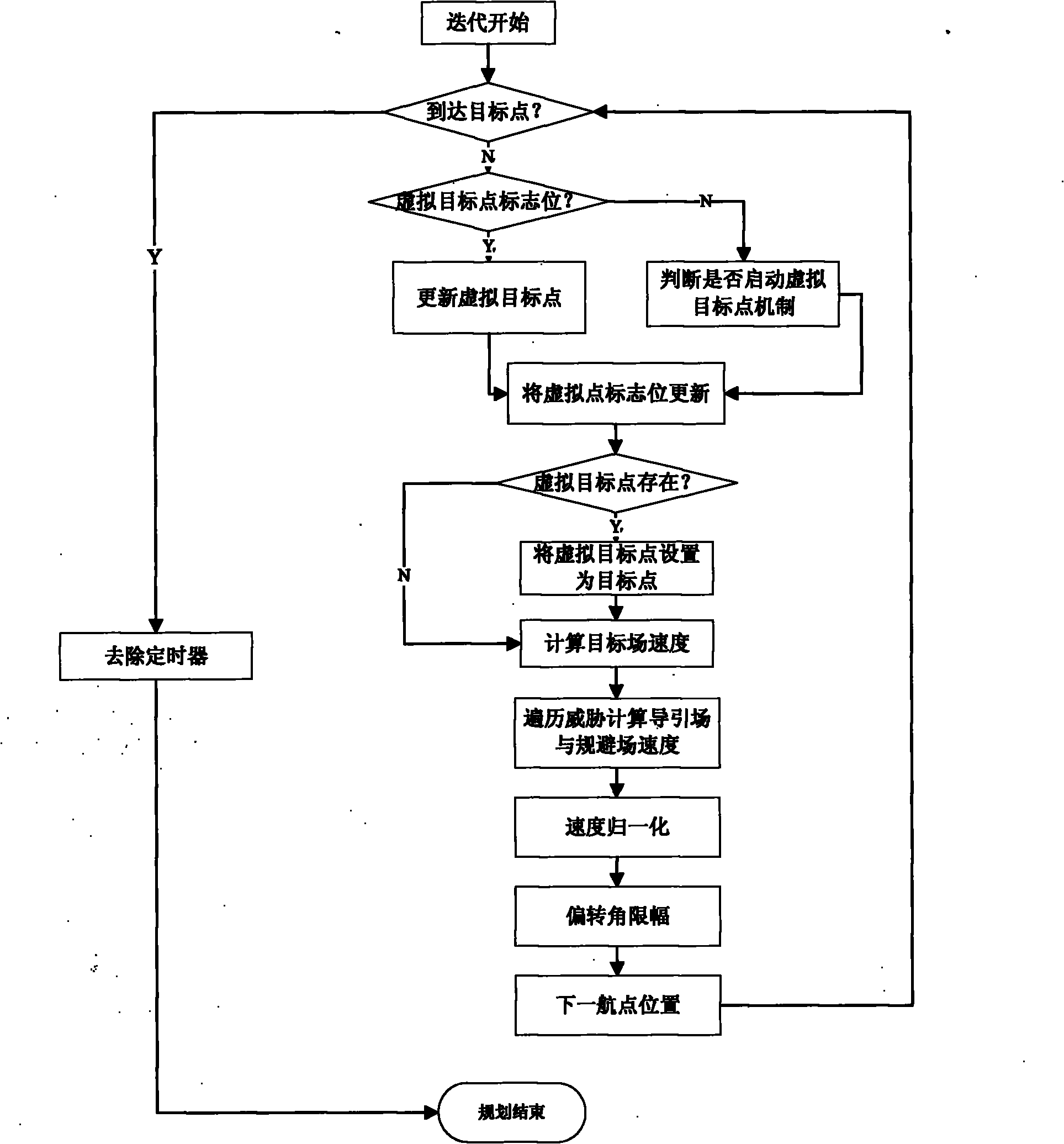
[0035] When the unmanned aircraft enters the autonomous navigation mode, the flight control software switches to the navigation guidance module based on the velocity vector field method. First, the navigation module uses the velocity vector field method for route planning. The position information of the unmanned aircraft received by the sensor, the state information and the environmental information detected by the ground station or the airborne sensor, combined with the target information are used as the input of the velocity vector field method. The velocity vector field first updates the environmental information, and then according to the unmanned aircraft Determine whether to enable the virtual target point mechanism or update the virtual...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com