

Five-finger independently-driven mechanical artificial hand
An independently driven and simulated hand technology, applied in the field of rehabilitation medical engineering, can solve problems such as difficulty in practical use by the disabled, heavy weight of the mechanical simulated hand, inconvenient use by the disabled, etc., and achieve a convenient daily use, simple structure, and light weight Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
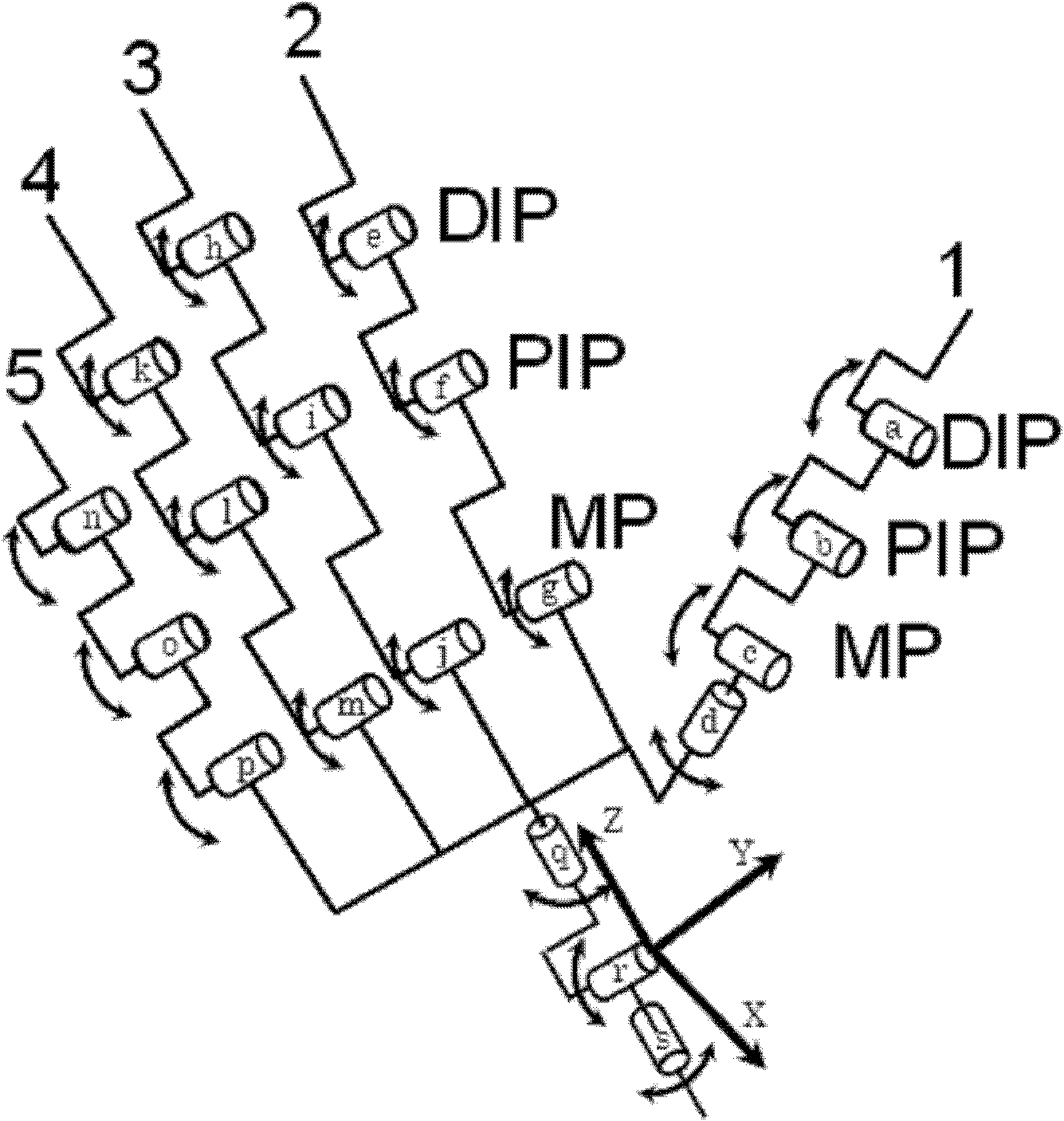
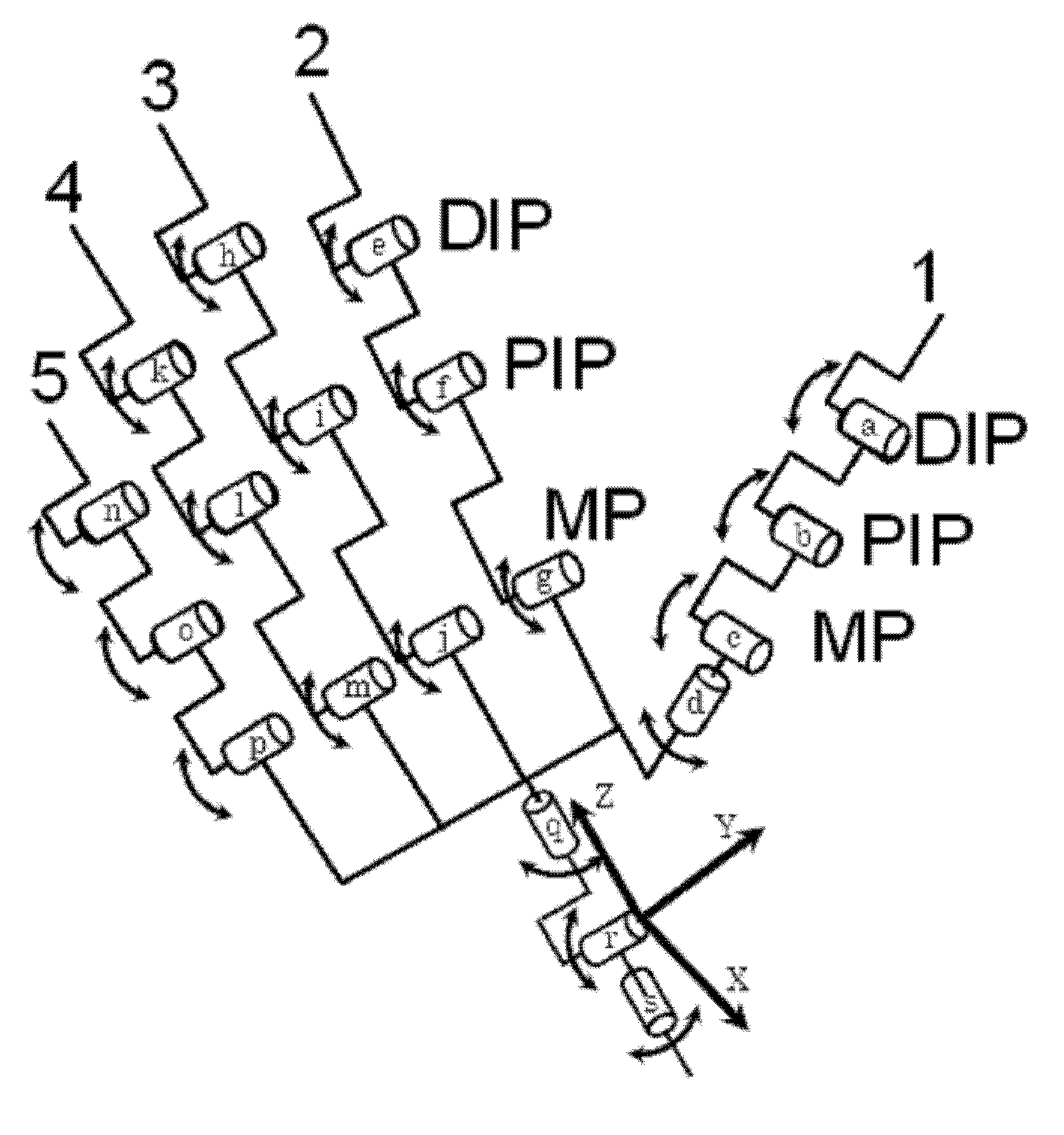
[0023] The scheme design idea of the present invention is to simulate the structural characteristics of human hand joints and develop a mechanical simulation hand with 19 degrees of freedom. As shown in Figure 1, the mechanical simulation hand has 5 fingers, as shown in Figure 1, numbers 1-5 Shown are the thumb, index finger, middle finger, ring finger, and little finger. Each finger has a DIP joint (DIP, distal interphalangeal joint, distal interphalangeal joint), PIP (PIP, Proximal interphalangeal joint, proximal interphalangeal joint) and MP (MP, metacarpophalangeal joint metacarpophalangeal joint)
[0024] The thumb joint, in addition to the above three joints, also has a rotating joint (shown as "d" in Figure 1), which makes the thumb rotate laterally in the direction of the other four fingers, and the corresponding direction of motion is shown in Figure 1 indicated by the arrow. In addition, there are three rotating joints at the wrist of the mechanical simulation han...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More