

Exoskeleton-type upper limb rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in the field of rehabilitation robots, can solve problems such as high labor intensity, guarantee of scapula, muscle strain, etc., and achieve the effect of training intensity assurance, training efficiency assurance, and scientific upper limb rehabilitation training
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
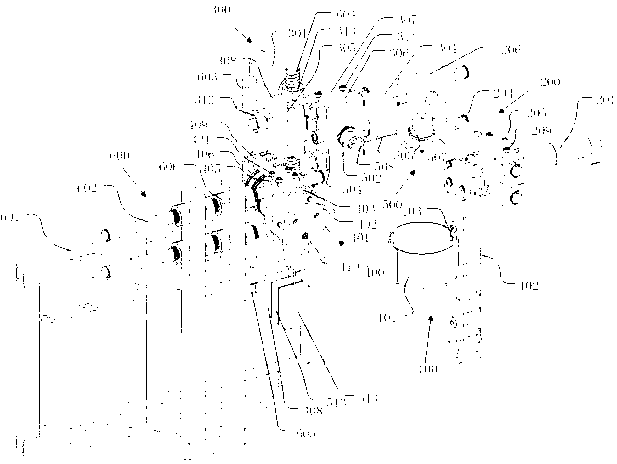
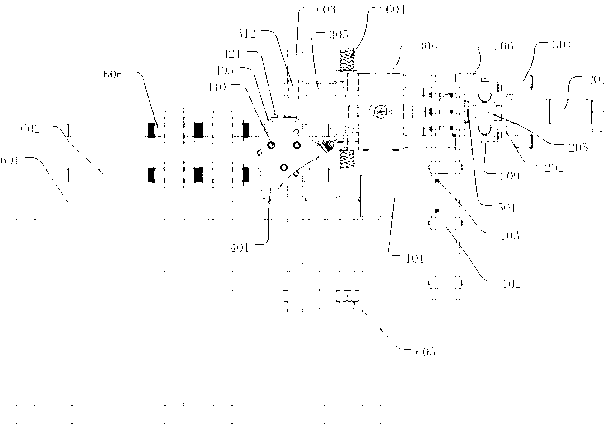
[0031] see figure 1 — Figure 8 , place the exoskeleton type upper limb rehabilitation robot behind the chair where the person is sitting and fix it, find the rotation center of the human scapula, adjust the height of the chair so that the axis of the transmission shaft 404 is at the same height as the rotation center of the human scapula. Manually loosen the tightening screw 416 and move the horizontal position adjustment block 405 horizontally along the horizontal guide rod 602, so that the axis of the transmission shaft 404 coincides with the rotation center of the human scapula, and tighten the tightening screw 416 so that the human scapula fits on the contact plate 401's concave surface, and then secure the person to the chair with a flexible rope strap. Equally, loosen tightening screw 209,210 and 311, adjust the horizontal position of horizontal position adjustment block 205,206 and 307, loosen lock nut 313 and adjust the vertical position of vertical position adjustme...
Embodiment 2
[0036] Both upper limbs of a person suffer from diseases, and when rehabilitation treatment is required for both limbs at the same time, the exoskeleton-type upper limb rehabilitation device of the present invention can be installed symmetrically on both sides of the bracket 601. Its working principle and implementation process and implementation Example 1 is the same.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More